Primeros pasos en Micropython
Seguimos en esta ocasión jugando un poco más en profundidad con el módulo NodeMCU que incluye un ESP8266 completo y entrando ya en algunas instrucciones de MicroPython. En esta ocasión

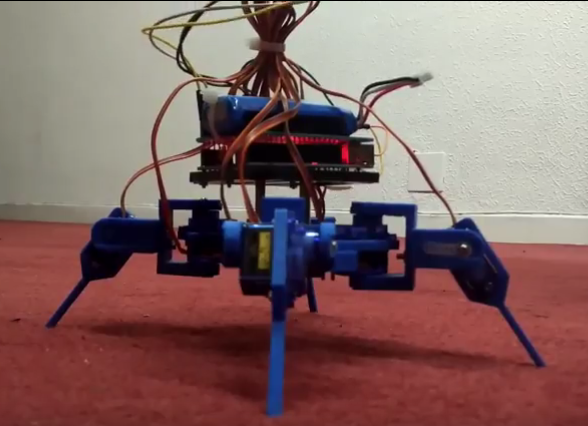
mBlock: Cuadrúpedo 4-Bot
Sois ya bastantes los que os habéis interesado en el robot cuadrúpedo que hemos estado presentando las últimas semanas, preguntándonos acerca de si podíamos hacerlo programándolo con bloques. No nos
Micropython en ESP8266
Tal y como os comentábamos en un post anterior, vamos a empezar hoy con nuestra pequeña serie de sesiones acerca de MicroPython para el NodeMCU, porque disponer de Python en
La familia ESP8266, ESP32
Todos los que nos movemos en esta curiosa afición de Arduinos, Raspberrys y similares sentimos una irresistible atracción por las conexiones inalámbricas, de modo que podemos conectar nuestros inventos sin los
Controlar 4-Bot con el Nunchuk
Seguimos publicando las sesiones del robot cuadrúpedo 4-Bot a buen ritmo. En esta ocasión vamos a ver cómo conectarle el Nunchuk de la Wii para controlar los movimientos que programamos
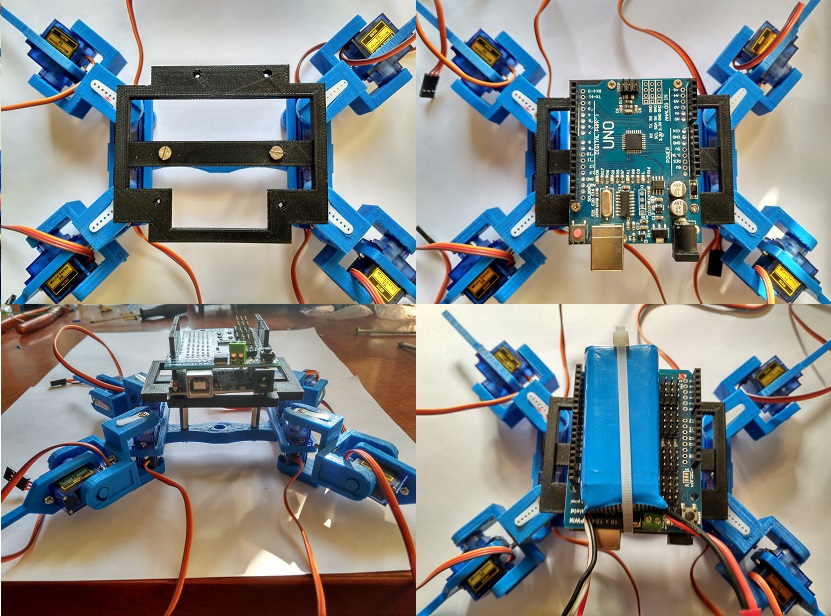
Programando los movimientos del 4-Bot
La semana pasada vimos cómo montar el robot cuadrúpedo 4-Bot, y como evidentemente no podíamos dejarlo ahí, hoy vamos a ver cómo conectar todos los componentes y programar sus movimientos. Antes
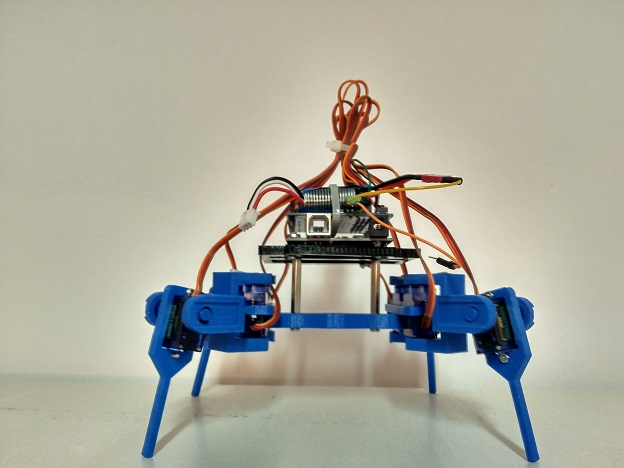
Robot cuadrúpedo: introducción y montaje
Inauguramos un nuevo área de trabajo en la página en la que usaremos robots impresos en 3d. Ya os habíamos comentado en otras ocasiones que teníamos muchísimas ganas de empezar con

Lector de huellas dactilares para Arduino
Después de una temporada (más larga de lo que nos habría gustado) sin publicar nuevas sesiones, volvemos a la carga aprovechando que la mayoría de nosotros estamos ya aterrizando de
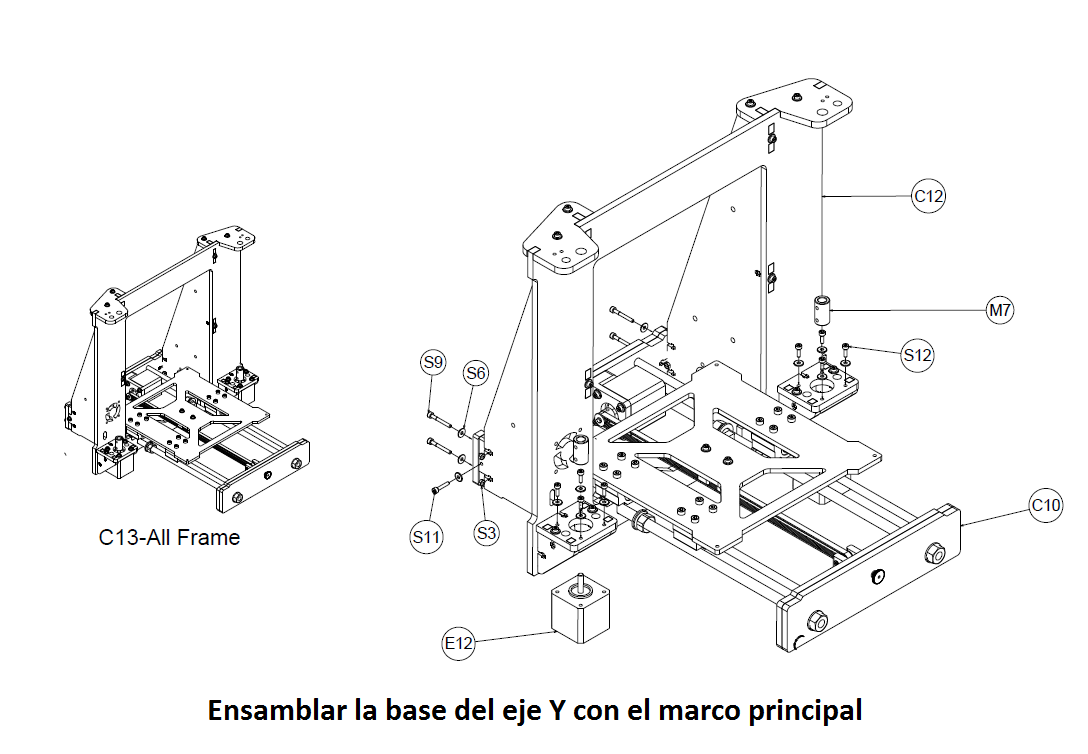
Ensamblar la base y el marco
Bueno, pues no queremos repetirnos mucho más, así que sin más preámbulos os dejamos la nueva sesión en la que seguimos montando la impresora 3d. [button link=»/» size=»medium» variation=»orange»] Ensamblar
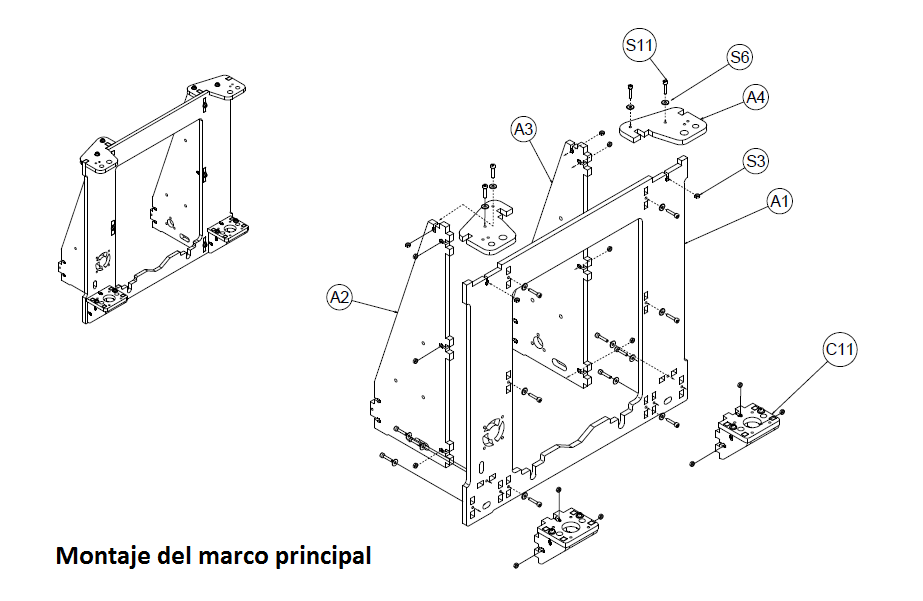
Montaje del marco principal
Seguimos montando nuestra impresora poco a poco, en esta ocasión nos metemos con el marco principal de la impresora. Este frame vertical será el que sostenga la mayoría de los