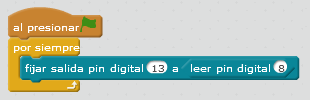
mBlock y los sensores infrarrojos
Tenemos ganas de que podáis empezar a construir vuestros sigue líneas, así que os traemos una nueva sesión en la que aprenderemos cómo funcionan y cómo programar los sensores infrarrojos utilizando
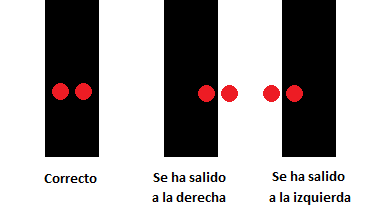
Los robots siguelíneas
Empezamos a trabajar con un nuevo tipo de robot, los siguelíneas o rastreadores. Son unos de los robots más extendidos en el mundo de la robótica e incluso en muchos
Últimas sesiones del coche con mBlock
Pues aquí estamos con el coche teledirigido otra vez, y ya para darlo por terminado en la sección de mBlock publicando las últimas dos sesiones. En ellas configuraremos el módulo
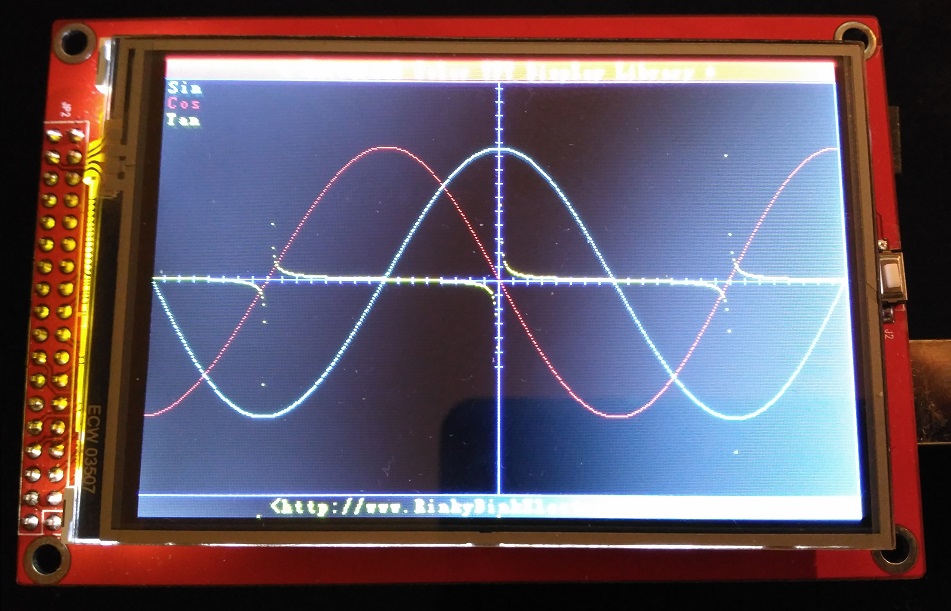
Shield TFT táctil 3.5″ para Arduino Mega
Las pantallas para nuestros Arduino son unos periféricos de lo más interesantes y útiles a la hora de llevar a cabo nuestros proyectos. En esta ocasión presentamos un shield para el
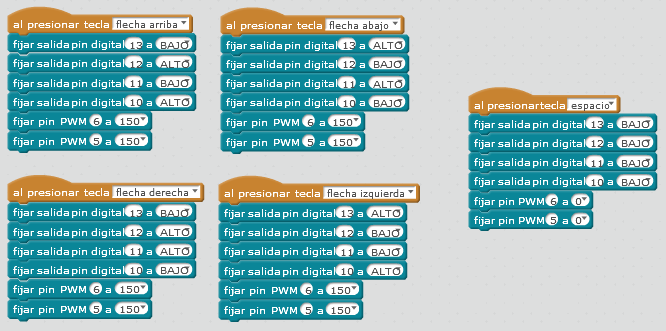
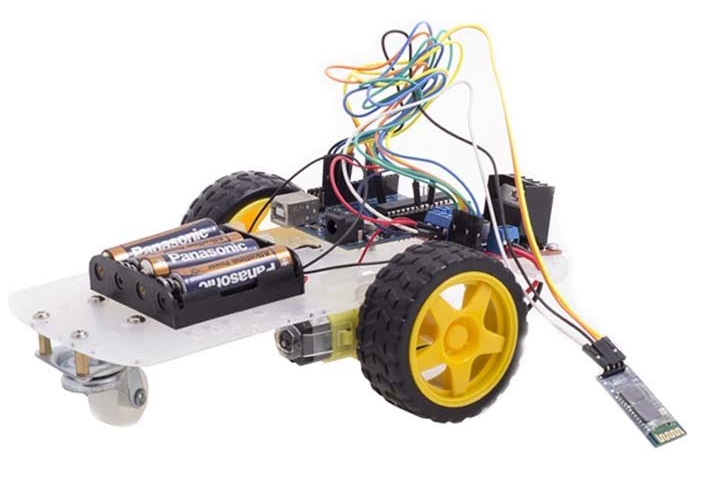
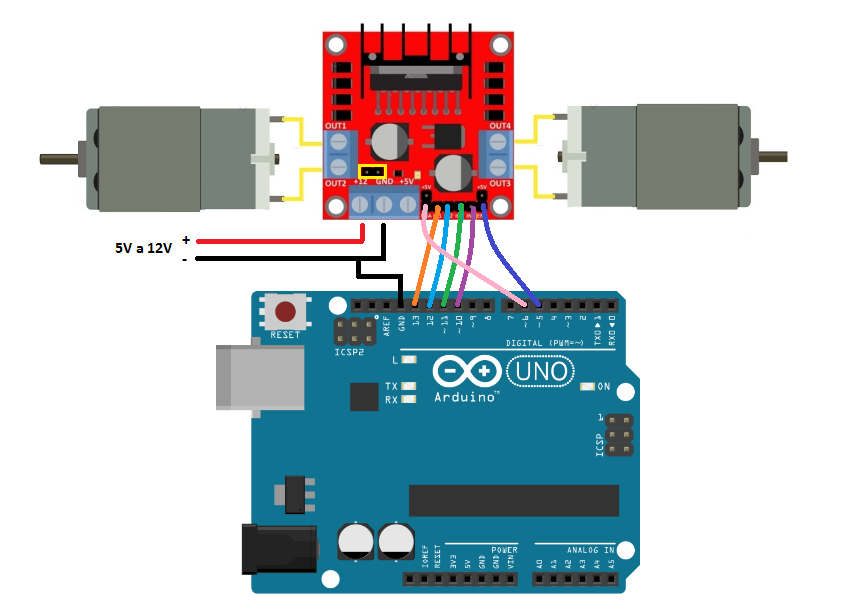
mBlock: Control del coche con el teclado
Una vez que hemos terminado de montar el coche, vamos a utilizar mBlock por primera vez para programarlo y controlarlo desde el teclado. Vis a ver cómo es muy sencillo
Sesiones del coche teledirigido con mBlock
Damos el pistoletazo de salida a las sesiones del primero de los robots que vamos a construir y programar con mBlock. Como no podía ser de otra forma, hemos empezado con
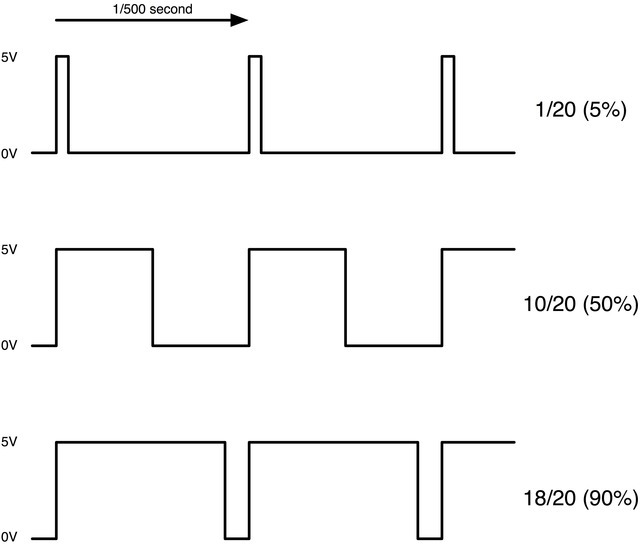
Raspberry y las señales PWM
Ha costado. No hay duda, pero aquí tenemos una nueva entrega de nuestra serie de tutoriales de introducción a la Raspberry pi. En esta ocasión la presentación de las capacidades
MBLOCK: INSTALACIÓN Y PUESTA EN MARCHA
Preparamos el terreno para el curso de robótica con mBlock con una sesión en la que instalaremos el entorno mBlock y aprenderemos a ponerlo en marcha. La verdad es que
Introducción a mBlock: curso de robótica infantil
Los asiduos de esta página sabréis que hemos comenzado un curso de robótica infantil utilizando S4A. Y es que a estas alturas ya nadie (o casi nadie al menos) duda
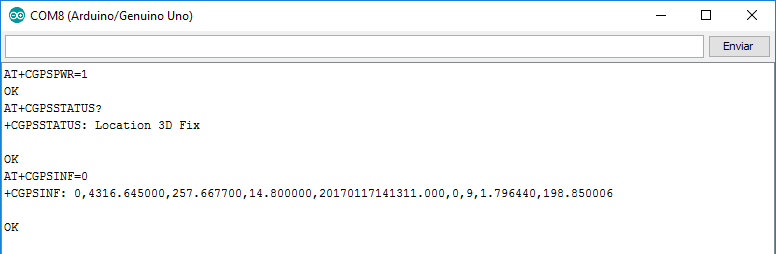
Comandos AT para GSM/GPRS y GPS
Tal y como comentabamos en la entrada de ayer, al hacer la última sesión con el SIM808, creímos necesario publicar un pequeño anexo con los comandos AT que hemos utilizado