Objetivos
Material requerido.
 |
Robot educativo |
CONTROLADOR DE MOTORES L298N
>
Si habéis seguido el curso de S4A sabréis que podemos manejar motores de corriente continua (CC) en S4A, utilizando directamente los pines de salida analógica de Arduino y un transistor.
Pero nuestro honorable Arduino está limitado por la intensidad que puede proporcionar al motor, y va a ser insuficiente cuando queramos usarlo para controlar motores de mayor potencia.
Por lo tanto, cuando queramos trabajar con motores un poquito potentes vamos a tener que utilizar unos componentes a los que llamamos controladores de motores o drivers. Estos controladores nos permitirán suministrar la potencia necesaria a los motores y os controlaremos utilizando nuestros Arduinos.
Hay muchísimos controladores diferentes, pero nosotros nos hemos decidido por el L298N por su facilidad de uso y su reducido precio, y porque nos permite elegir los pines del Arduino que queremos usar para controlar los motores. El L298N puede trabajar con tensiones hasta 35V y una intensidad de hasta 2A por canal por canal, con lo que puede manejar hasta 4A en total y unos 25W.
Este módulo tiene además otra característica muy importante, y es que nos permite controlar la dirección de giro de los motores, es decir podremos hacer que giren en ambos sentidos, algo totalmente necesario para nuestro coche.
Además nos permite obtener del módulo una tensión de 5V, perfecta para alimentar nuestro Arduino sin tener que utilizar otra fuente adicional. Eso sí, este regulador sólo funciona si alimentamos el módulo con una tensión máxima de 12V. En nuestro caso son 4 pilas de 1.5V,o sea, 6V.
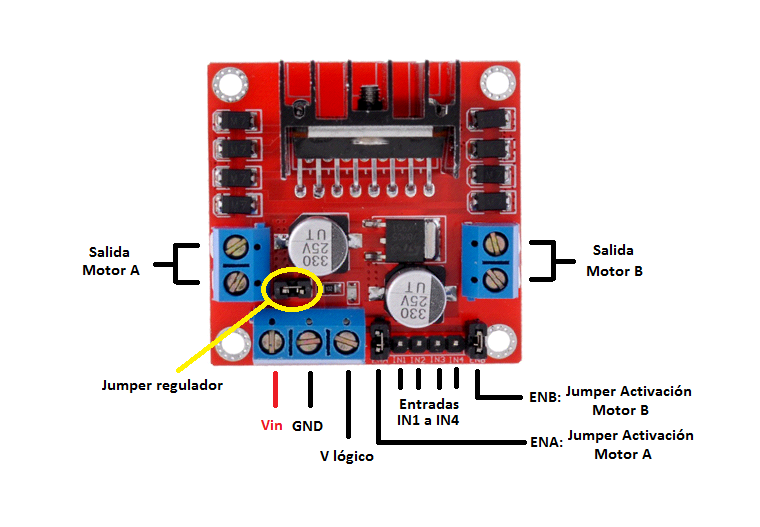
La entrada de tensión Vin admite tensiones entre 3V y 35V, y justo a su derecha en la imagen tenemos el pin que debemos conectar a GND.
La tercera conexión de ese grupo V lógico puede funcionar de dos maneras:
Los pines IN1 e IN2 nos sirven para controlar el sentido de giro del motor A, y los pines IN3 e IN4 el del motor B. Funcionan de forma que si IN1 está a HIGH e IN2 a LOW, el motor A gira en un sentido, y si está IN1 a LOW e IN2 a HIGH lo hace en el otro. Y lo mismo con los pines IN3 e IN4 y el motor B.
Para controlar la velocidad de giro de los motores tenemos que quitar los jumpers y usar los pines ENA y ENB. Los conectaremos a dos salidas analógicas de forma que le enviemos un valor entre 0 y 255 que controle la velocidad de giro. Si tenemos los jumpers colocados, los motores girarán a máxima velocidad.
MONTAJE DEL ARDUINO Y DEL L298N
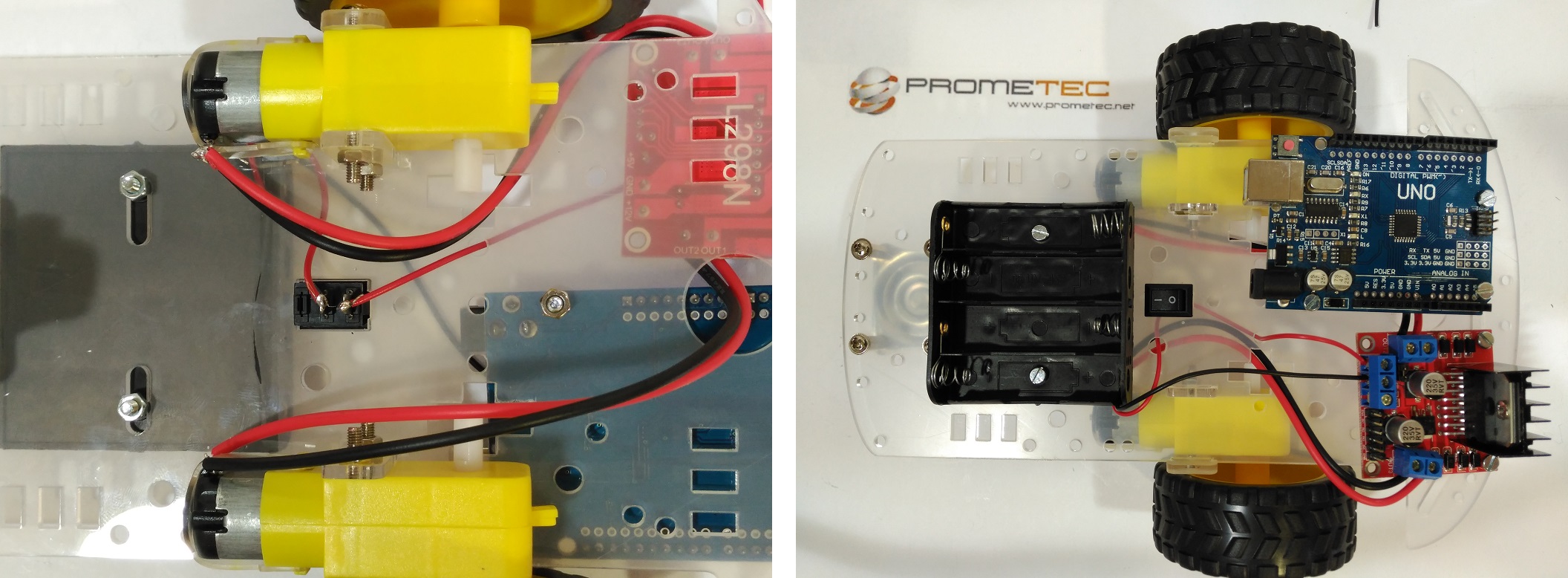
Con el chasis montado vamos a colocar el Arduino y el controlador de motores L298N. No tenéis por qué hacerlo igual que nosotros, pero nosotros vamos a recomendaros el lugar y el orden para montarlo que nos ha parecido mejor y más sencillo.
Con eso en mente os recomendamos montar primero el L298N, para poder conectarle los cables de los motores sin que nos moleste el Arduino. Lo colocaremos en esta posición mediante 2 tornillos (de los dos tipos que nos quedan, los más largos):
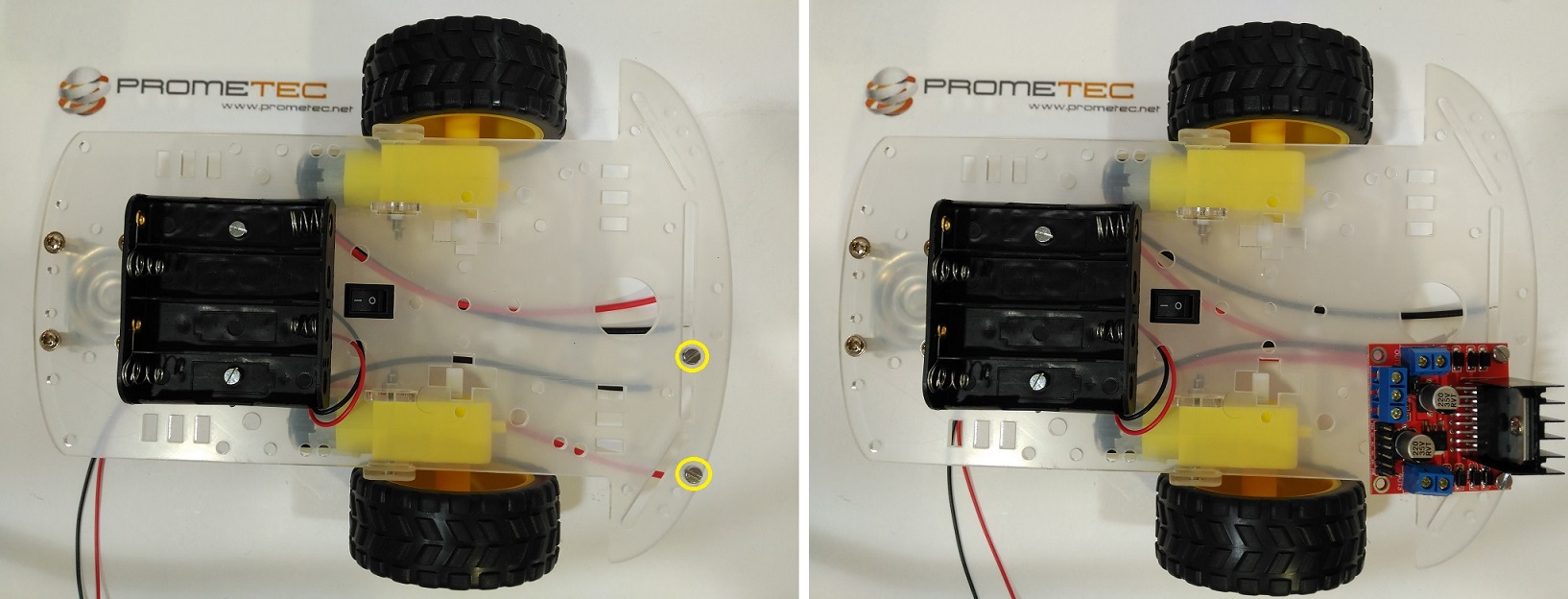
Y a continuación conectaremos los cables de los motores a los bornes de alimentación de los motores. No os preocupéis demasiado por la posición en la que conectéis el cable negro y el blanco. De ello dependerá hacia donde gire el motor, pero si gira en el sentido que no esperamos hay varias maneras de corregirlo, y así lo haremos más adelante.
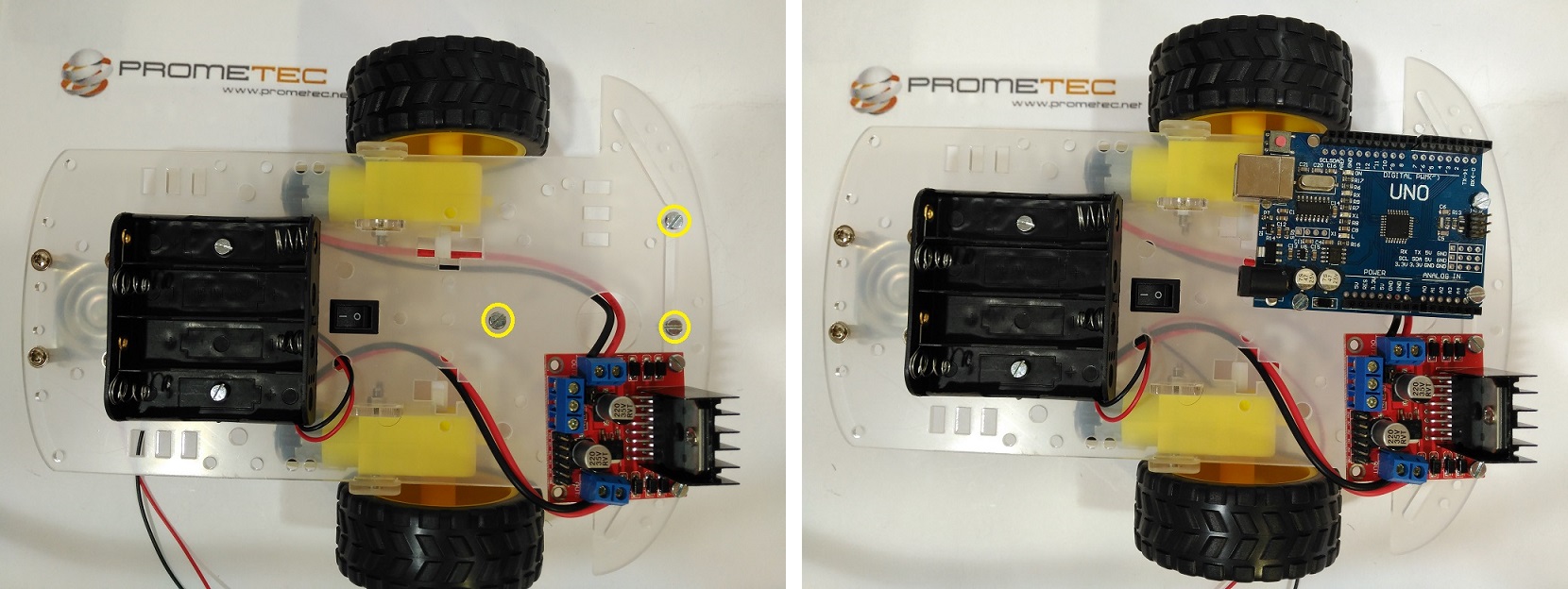
Una vez conectados vamos a colocar el Arduino justo encima del controlador utilizando 3 tornillos (de los largos también):
CONEXIONES ELÉCTRICAS
<
Una vez hemos montado el Arduino y el L298N, y sabemos cómo funciona este último, ya estamos en disposición de realizar las conexiones eléctricas pertinentes. El esquema eléctrico sería el siguiente:
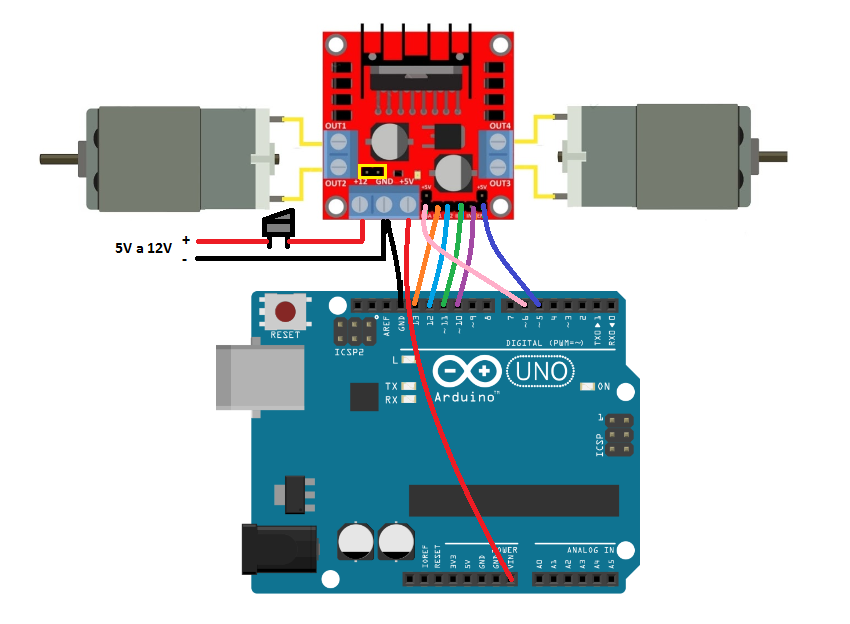
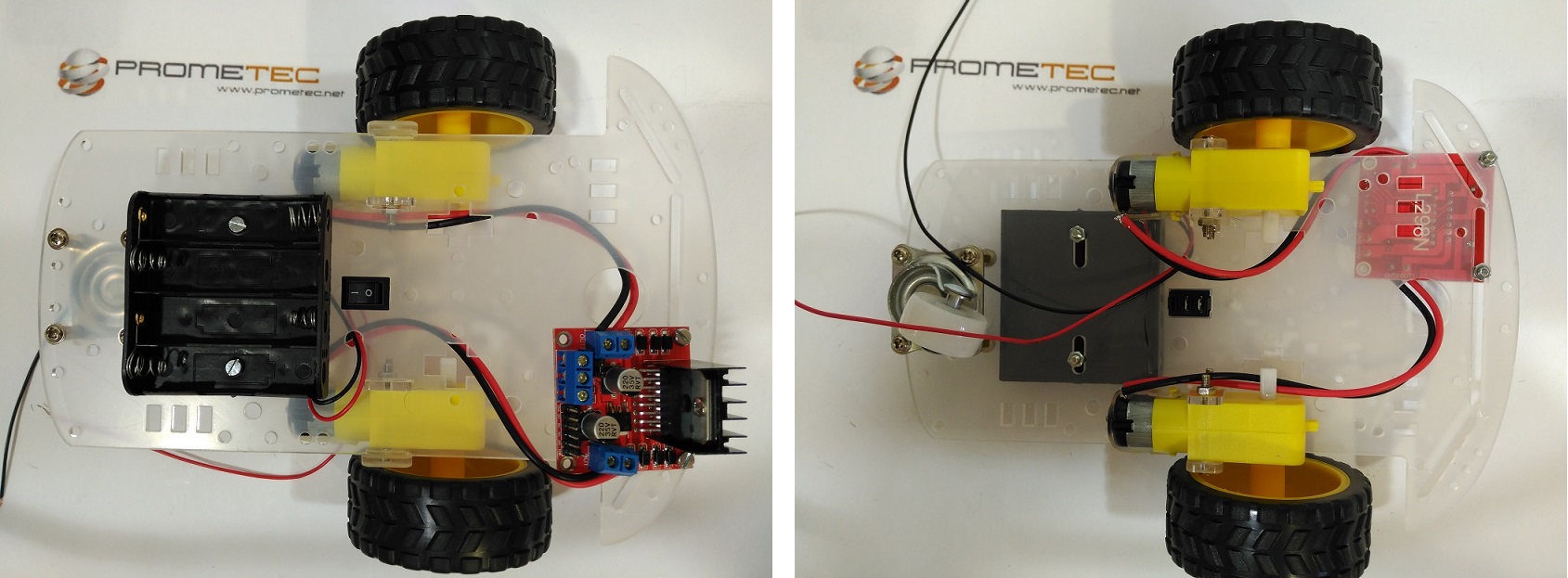
Siguiendo con nuestras recomendaciones, creemos que lo más sencillo es conectar primero los cables de alimentación y GND del soporte para pilas al L298N, pasando antes por el interruptor que colocamos para poder encenderlo y apagarlo fácilmente.
El cable negro lo conectaremos directamente al GND del L298N, y será el cable rojo el que pasaremos por el interruptor. Para ello lo cortaremos y lo soldaremos a una de las patas metálicas del interruptor (da igual a cuál), y la parte sobrante de cable la conectaremos a la otra parte del interruptor, y de ahí a la alimentación del módulo L298N.
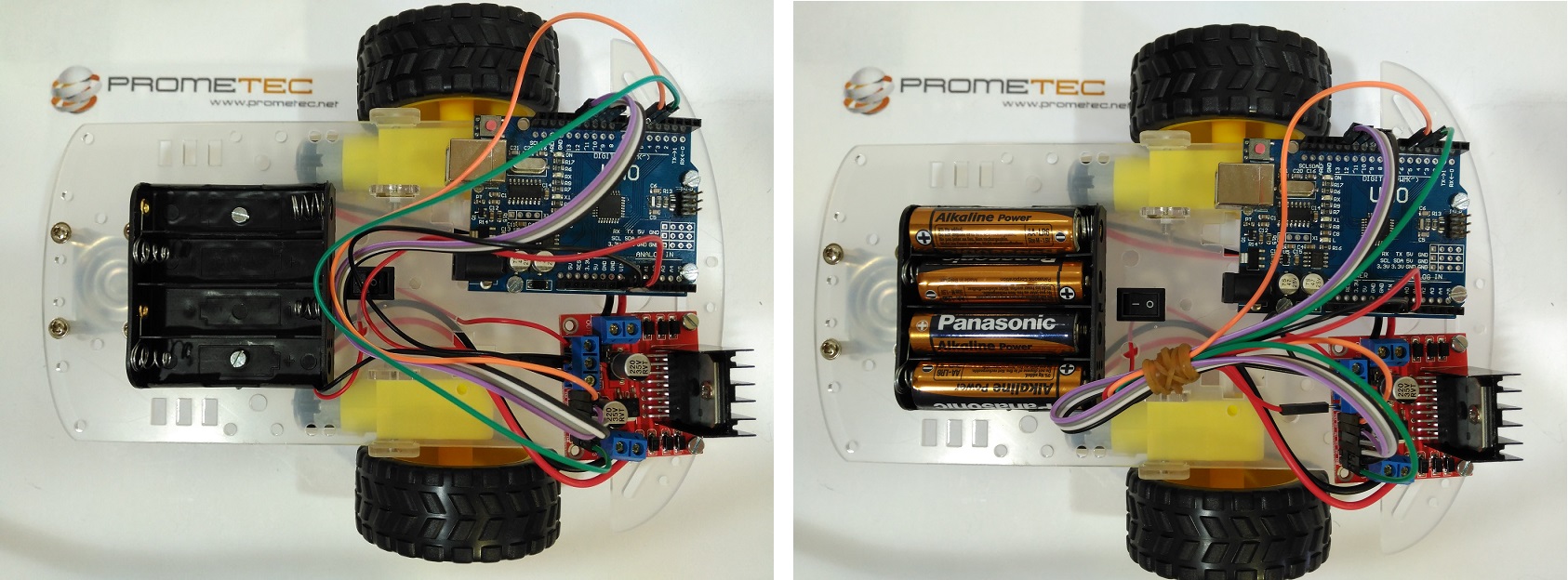
El resto de cables los conectaremos como hemos visto en el esquema eléctrico, tratando de utilizar cables de colores diferentes y de la forma más ordenada posible, para asumir el menor riesgo a equivocarnos posible.
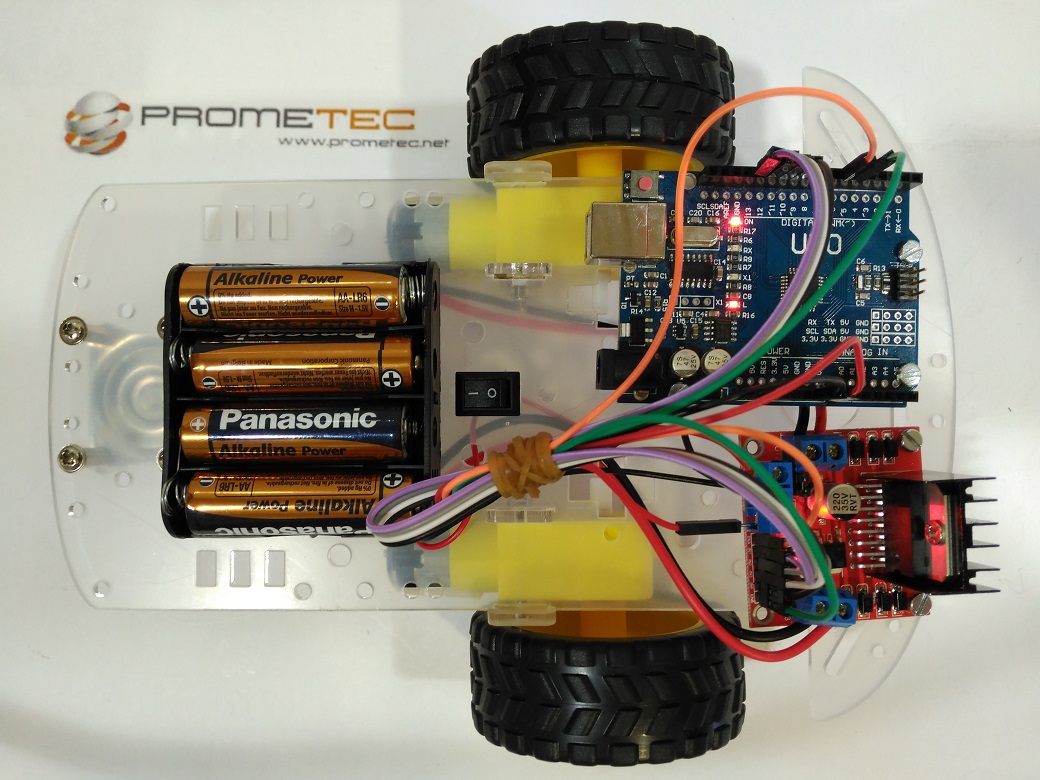
Una vez conectados todos los cables podemos colocarle una goma o una brida para tenerlos unidos que esté un poquito más ordenado. Además podemos meterle ya las pilas, que os recomendamos que sean unas buenas pilas alcalinas.
Si pulsamos el interruptor deberían encenderse los LEDs de alimentación tanto del Arduino como del L298N.
Resumen de la sesión
En esta sesión hemos aprendido varias cosas importantes: