Lo que hay que saber para elegir los ESCs para un cuadracóptero

Cada vez que leo ESC mi mente por algún motivo hace la asociación con esa tecla en la esquina superior izquierda del teclado que solemos pulsar normalmente expectantes con la esperanza de que ocurra algo…
Pero no. Nada que ver. Los ESC (Electronic Speed Control), también llamados variadores, son unos dispositivos que reciben una señal del control de vuelo y envían la alimentación adecuada a los motores. Visto así, no parece que tiene tanto misterio, verdad?
Lo cierto es que sí que tiene algo más de misterio desde el momento en que los ESC tienen su propio firmware con su correspondiente interface con el que pueden ser programados y sus propios protocolos de comunicación.
Tampoco vamos a entrar en este post en temas demasiado puntillosos (por ejemplo cómo detectar un MOSFET defectuoso…) pero sí queremos darte el conocimiento imprescindible que tienes que tener sobre los variadores si te gusta este hobby.
En este artículo explicaremos lo que es un controlador electrónico de velocidad (en adelante y para abreviar, ESC de Electronic Speed Controller) y los factores que afectan en la elección de uno de ellos. Revisaremos algunos de los factores que los principiantes deberían considerar cuando adquieran sus ESCs para un mini quad o un dron de carreras.
Los controladores electrónicos de velocidad ESC están ahí para hacer lo que su nombre indica. Los ESC reciben la señal del acelerador del controlador de vuelo FC y llevan al motor sin escobillas a la velocidad óptima proporcionando la señal de corriente apropiada para ello. Los ESCs de calidad aseguran una experiencia de vuelo suave y confiable.
Aquí en España, por algún motivo llamamos variadores a los ESC, supongo que es porque los ESC varían la frecuencia del tren de impulsos que hace girar el motor. En latinoamérica sí que se les llama ESC, pero utilizando la pronunciación inglesa (i-es-si).
Indice de contenido
- Rating de corriente – Amperaje
- Procesador
- Firmware
- Protocolos ESC
- Frenado activo y hardware PWM
- Tamaño y peso
- Voltaje de estrada
- Con o Sin BEC
- ESC 4 en 1
- Marcas de ESCs
- Las ESC y el empuje
- Bootloader
Rating de corriente – Amperaje
Lo primero que debes mirar cuando elijas ESCs (o variadores) es su rating de corriente, que se mide en amperios. Los motores “chupan” corriente cuando giran. Si el motor quiere más corriente de la que tu ESC puede proporcionarle, el ESC empezará a calentarse y eventualmente acabará fallando. Un fallo catastrófico podría acabar incluso con el ESC en llamas.
Hay tres factores que tienden a incrementar el consumo de corriente y a poner más estrés en los ESC:
- Motores con KV más elevados
- Motores más grandes (diámetro y/o altura del estátor)
- Hélices más grandes (longitud y/o paso)
Hay dos Ratings de corriente en un ESC: continua y ráfaga. El Rating continuo de corriente se refiere a la máxima corriente que puede manejar un variador de forma continua y de manera segura. Como es dudoso de que uses el acelerador al máximo durante periodos extendidos de tiempo incluso cuando hagas carreras, los ESC pueden manejar corrientes mayores durante breves periodos de tiempo (por ejemplo 10 segundos) y éste es el rating de corriente en ráfaga.
Algunas veces los principiantes confunden el Rating de corriente de un ESC con el amperaje que se aplica al motor. En realidad es justo al contrario. Es el motor el que exige al variador el amperaje, así que es el ESC el debe estar capacitado para proporcionar el máximo de amperios que tu motor demande. El hecho es que utilizar ESCs más grandes no tiene ningún beneficio. Si reemplazas tus ESC de 20 A por otros de 40 A, en realidad lo que verías es que el comportamiento empeora debido a peso añadido
Cómo averiguar la corriente demandada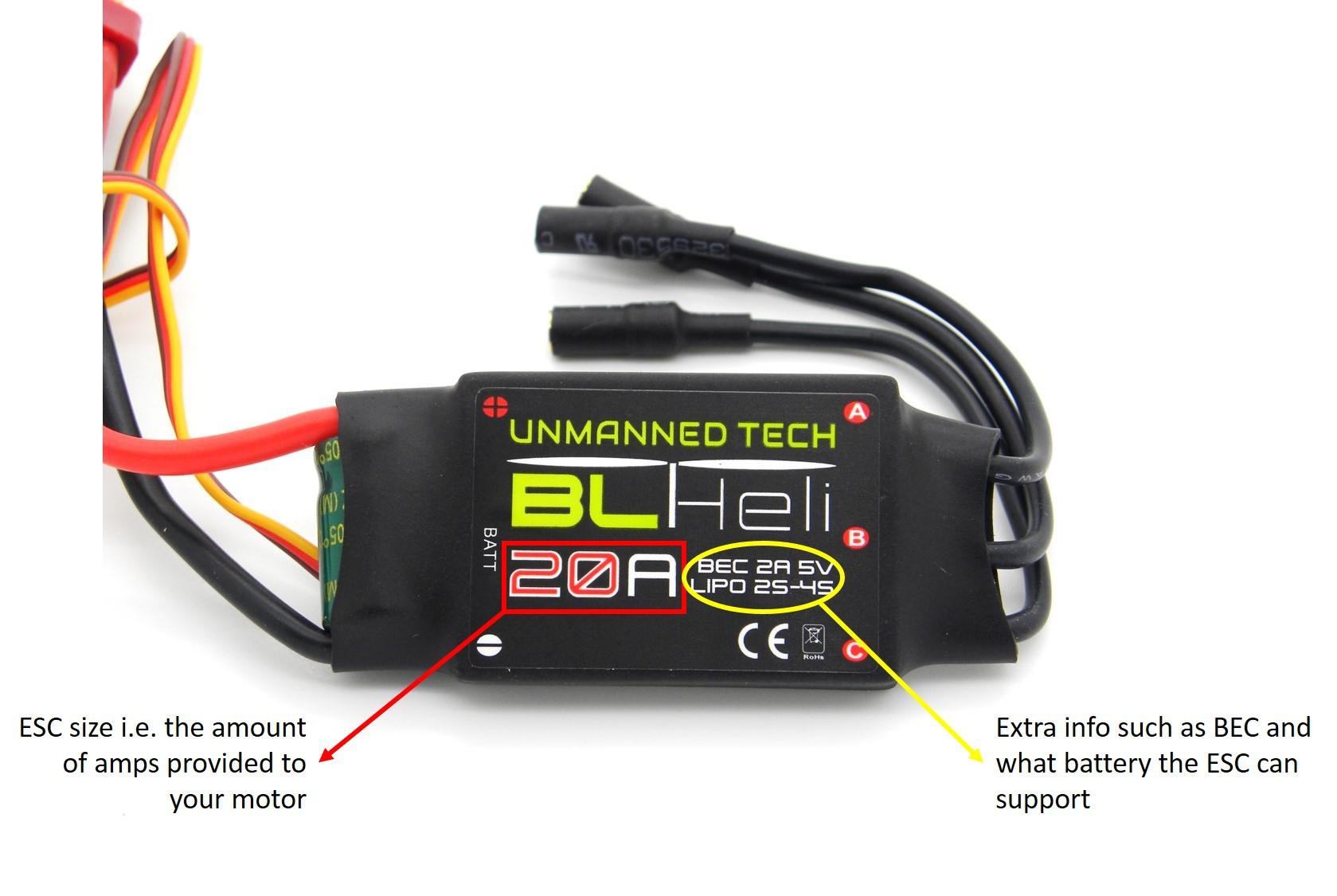
Puedes calcular la corriente demandada en un banco de pruebas con un amperímetro. Alternativamente podrías encontrar resultados de ensayos en la web con tu combinación de motor-hélice. Algunos fabricantes proporcionan estos datos en sus páginas de producto.
Por ejemplo, si quieres usar un motor 2206 con hélices de 5030 y una batería LiPo 4s, este demanda 10 A al 100% de acelerador, por lo tanto un ESC para 12 A debería ser suficiente. Si por el contrario usases hélices 6045 la corriente máxima podría llegar a 20 A, y en este caso los variadores deberían ser de 20 A. No hace daño dejar un margen al error, pero tampoco hace falta pasarse de la raya. Los ESC más grandes, además de ser mas caros también son más pesados, y no añade absolutamente ningún beneficio tenerlos.
El empuje y la demanda de corriente son mayores en los ensayos estáticos?
Una cosa que hay que tener en mente es que la mayoría de los ensayos estáticos probablemente muestren valores más altos del empuje y de la demanda de corriente que las que se darán en condiciones reales de vuelo. Por un lado, los controladores PID siempre tienden a dejar algo de margen para estabilizar el dron así que nunca llegas a ver realmente el 100% de acelerador cuando estás en vuelo. Además, los motores no necesitan trabajar tan duro cuando se mueven hacia delante a través de “aire libre”, así que no demandan tanta corriente. Se puede estimar una demanda de entre un 10 y un 20% menor en vuelo real comparada con la del ensayo estático.
Por otro lado, el estilo de vuelo es algo muy personal. Puede que tú no utilices el acelerador a tope muy a menudo. Si vuelas así tu demanda de corriente será considerablemente menor
Firmware
Dos de los firmware para variadores más antiguos son SimonK y BLHeli. Originariamente ambos eran de código abierto, desarrollados y mantenidos por aficionados al RC. En aquellos viejos días, el software de los fabricantes no era óptimo y los aficionados solían cargar SimonK o BLHeli es sus ESCs. Esto se acabó convirtiendo en un estándar y los ESC ya venían pre programados con uno de estos firmware. La mayoría de los usuarios optan por BLHeli por su amplia gama de funciones y la facilidad de manejo de su interface, por otro lado, puede que SimonK ya no sea actualizado, así que si tienes que optar entre los dos, hazlo por BLHeli.
BLHeli_S es la segunda generación del firmware BLHeli, desarrollado específicamente para ESCs que tienen procesadores Busybee con hardware PWM. Tiene también un interface de usuario simplificado.
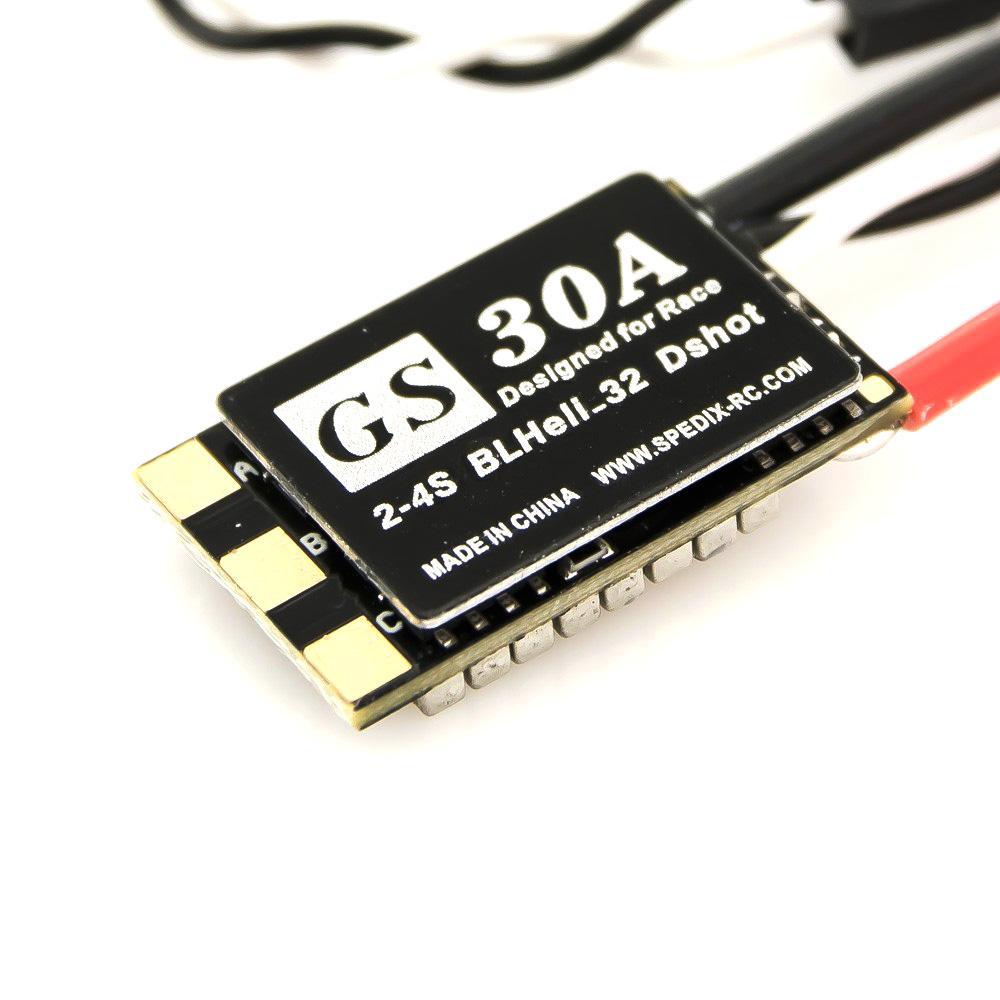
BLHeli_32 es la tercera y más reciente generación de firmware de BLHeli. Está escrita específicamente para un variador de 32 bits y ya no es de código abierto. Estos procesadores más potentes permiten un comportamiento más suave y preciso.
El firmware KISS para ESC es de código cerrado y exclusivo para los ESC de KISS
Procesador
Hay tres familias de procesadores MCU (micro controller unit) que necesitas conocer. Actualmente, la mayoría de los variadores para multirrotores del mercado usan uno de estos tres procesadores Atmel, Silabs o ARM Cortex. Los diferentes MCY tienen diferentes especificaciones y funciones que te permiten correr en ellos diferente firmware.
- Los ESCs con base en el ATMEL de 8 bits pueden correr con firmware SimonK y BLHeli_ESC
- Los ESCs con base en el SILABS de 8 bits corren con firmware BLHeli y BLHeli_S
- Los ESCs con base en el Atmel ARM Cortex de 32 bits pueden correr con BLHeli_32.
El ATMEL de 8 bits solía ser más común antes de que el mercado comenzase a estar dominado por SILABS. Los ESCs de SILABS suelen ser mejores que los que tienen ATMEL de 8 bits (con excepciones). En 2017 el MCU Atmel Arm Core se está volviendo común en los ESCs de 32 bits.
Entre los variadores con base Silabs, hay diferentes procesadores que tienen diferente comportamiento. Los dos más usados ahora son el F330 y el F39X (F396). El F330 tiene una velocidad de reloj más baja y puede tener problemas corriendo con motores de KV alto. El F39X no tiene esos problemas y soporta los protocolos ESC Multishot y Oneshot42.
Dos buenos ejemplos de estos ESC son el Littlebee de 20A (F330) y el DYS XM de 20A (F39X).
Los MCU Busybee (EFM8BB) son una evolución de el F330 y del F39X. El ESC de BLHeli_S comúnmente corre:
- BusyBee1 – BB1 (EFM8BB10F8)
- BusyBee2 – BB2 (EFM8BB21F16)
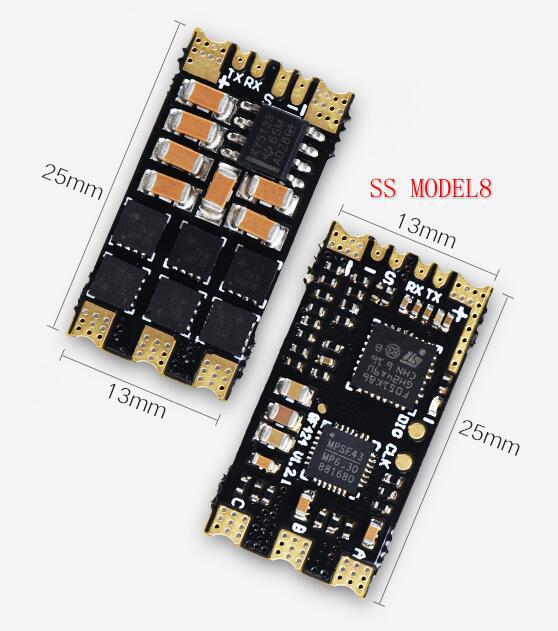
Éstos son mejores porque en lugar de usar software PWM (pulse with modulation) o pulso con modulación, tienen un hardware específico que puede generar una señal PWM que está sincronizada con el ciclo de trabajo del procesador. El resultado es una respuesta del acelerador mucho más suave. También soportan los últimos protocolos digitales ESC: D-Shot. Algún ejemplo de ESCs que utilizan estas MCU son el Aikon SEFM 30A y el DYS XS30A .
En resumen, el comportamiento de los MCU de mejor a peor:
- BB2
- BB1
- F39X
- F330
- Atmel-8-bit
- Aikon SEFM 20A – BusyBee 8-bit
Muchos ESCs todavía corren con procesadores de 8 bits (F330, F39X, Busybee etc), pero desde 2016 algunos variadores con base en el STM32 de 32 bits han empezado a emerger como el KISS 24A Race Edition, el V-Good Firefly, y el Gemfan Maverick. Estos poderosos procesadores de 32 bits abren muchas nuevas funciones que no eran posibles con la limitada capacidad de proceso que tenían los MCU de 8 bits. Funciones como telemetría de los ESC en el KISS de 24 A o “Cambiar la dirección de rotación en el arranque” en el Firefly, por mencionar alguna.
Protocolos ESC
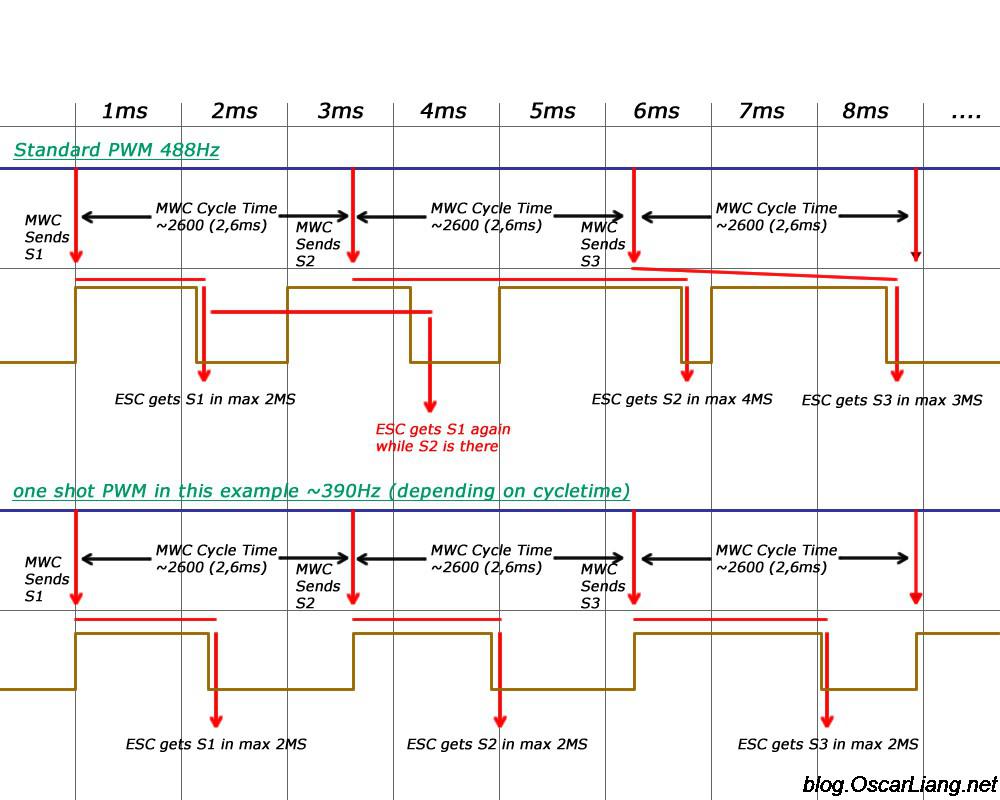
Los protocolos ESC determinan cómo de rápido viajan las señales del FC al variador. Esto puede tener un gran impacto en el comportamiento de cuadracóptero. El protocolo original (y más viejo) de ESC, el PWM estándar tiene un retraso de 2 ms, mientras que el Multishot más rápido ha reducido la latencia a 5 a 25 us.
Aquí hay una lista de protocolos usados en las ESC, de más viejo a más moderno
- Standard PWM
- Oneshot125
- Oneshot42
- Multishot
- DShot (DShot150, DShot300, DShot600, DShot1200)
- ProShot
Chequea este post para aprender del firmware y protocolos de los ESC. No todas los variadores soportan todos los protocolos. Asegúrate de chequear las especificaciones antes de comprar.
Frenado activo y hardware PWM
Hay una serie de funciones clave en los ESC que merece la pena mencionar:
El frenado activo (o luz amortiguada) – Mejora enormemente la respuesta
Hardware PWM – Mejora la suavidad y la respuesta y hace que el quad sea más silencioso y un poco más eficiente. También permite un control más fino.
Driver de puertas dedicado (Dedicated gate driver) -Los variadores más baratos utilizan transistores para las puertas FET, pero usando un driver de puertas dedicado se mejora la efectividad del frenado activo.
Peso y tamaño
Normalmente, el tamaño y peso de un ESC depende del amperaje que soporta. Los variadores diseñados para mini quads tienen dimensiones bastante parecidas y pesan hoy día unos 4 o 6 gramos cada uno. Se ha vuelto desafiante fabricar ESCs cada vez más pequeños y ligeros sin sacrificar el rendimiento ni el enfriamiento. Para las carreras normalmente quieres que tu quad sea tan ligero como sea posible, pero seguramente los ESC no es el mejor sitio para buscar si quieres quitarte unos gramos. Los variadores más pequeños tienden a calentarse más rápido y son más difíciles de enfriar.
Voltaje de entrada
Algunos ESC pueden soportar voltajes de hasta 6S, otros puede que sólo de 4S. Asegúrate que el ESC que eliges es compatible con el voltaje de la batería LiPo que quieres usar en tu mini quad. Meterles a tus variadores más voltaje del que admiten los freirá y probablemente a tus motores también.
Con o Sin BEC – Opto ESC
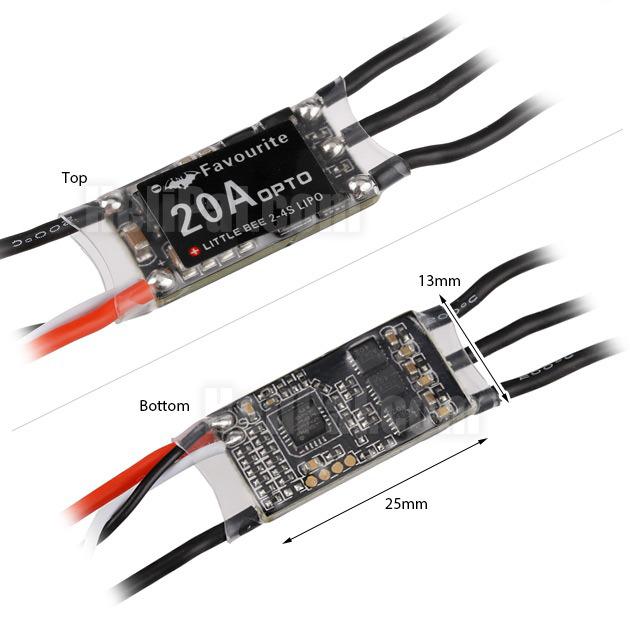
Algunos ESC vienen con un BEC incluido (BEC son las iniciales de Battery Eliminate Circuit) que da una salida de 5V que puedes utilizar para dar potencia a tu FC, RX, etc. Aquellos que no tienen un BEC incluido son conocidos como Opto ESC por fabricantes y distribuidores. A pesar de este nombre, estos ESCs podrían no usar opto-aislantes. Un opto-aislante es un componente óptico que transmite señales mediante la luz. Básicamente separa el circuito de alto voltaje y el circuito de bajo voltaje y previene que los voltajes rápidamente cambiantes dañen la electrónica de los variadores o interfieran con las señales del FC
Los ESCs que no tienen un BEC tienen la ventaja de ser más ligeros, más pequeños y menos ruidosos (puesto que la circuitería de control del motor está ópticamente aislada del radio receptor y del controlador de vuelo.
Sin el BEC de 5 V, tu FC y RX necesitarán una fuente de potencia separada. Los variadores sin BEC no tienen el cable rojo para el servo, únicamente el cable de la señal y el de la tierra.
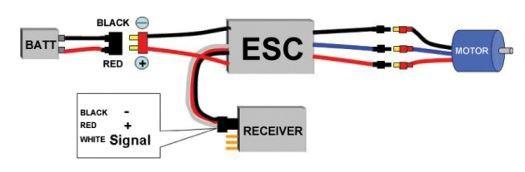
Cuestión de novatos: Conectar el variador y el motor
Si te estás rascando la cabeza mirando los tres cables y pensando cómo se conectan, no te preocupes por el orden. Simplemente engancha los tres cables de un extremo del variador con los tres cables del motor en cualquier orden. Si el motor gira en la dirección equivocada cambia dos de los cables. Si utilizas firmware BLHeliSuite también puedes cambiar la rotación en los ajustes, Para los usuarios de KISS ESC hay dos pads para soldar que puedes puentear para cambiar la rotación del motor.
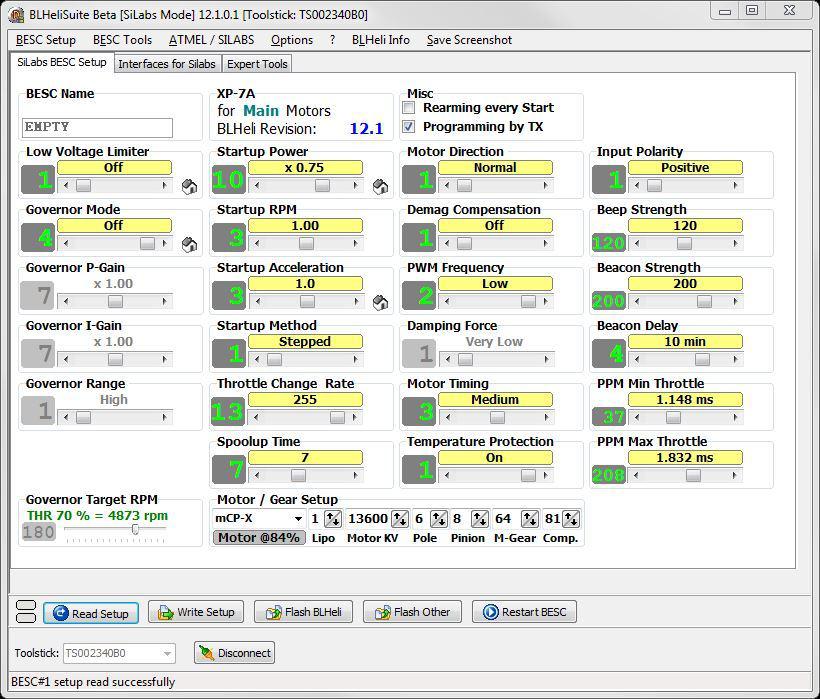
Configurador de BLHeli ESC
BLHeliSuite sólo corre en windows, pero hay una nueva chrome app llamada BLHeli Configurator que puedes usar para configurar tus ESC que corre con cualquier sistema operativo siempre que tengas el Google chrome instalado. Funciona con los variadores BLHeli y BLHeli_S
Motores con el ESC integrado
Hay motores que integran su propio ESC como el ZTW Black Widow. Mientras que esto puede parecer conveniente y ahorrador de espacio, pero es una idea discutida. En caso de fallo del motor o del ESC, ambos deben ser reemplazados, lo cual es más caro a plazo largo. Otro problema que tienen los motores con variador integrado es que ninguno de los dos, ni el motor ni el ESC puede ser individualmente mejorado.
ESCs 4 en 1

Una opción conveniente es un ESC 4 en 1, es decir 4 ESCs integrados en una sola placa del mismo tamaño que un FC o una PDB que puedes apilar juntas limpiando todo tu cableado y mejorando la distribución de peso del aparato, puesto que si el mini quad tiene menor momento de inercia en la respuesta debería ser mejor. Sin embargo, dañar una sola de las ESCs significa retirar toda la placa. Hay un compromiso entre el riesgo y la conveniencia.
Algunos fabricantes han sacado un diseño que usa 4 tarjetas ESC separadas que se unen para formar una única placa que se puede apilar, como la Quadrant 4-in-1.
Algunas marcas de ESC
Algunas marcas de variadores (en orden alfabético)
- Aikon
- Armattan
- Castle
- DYS
- EMAX
- Favourite
- FPVModel
- Gemfan
- KISS
- Lumenier
- Racerstar
- Rotorgeek
- Sunrise
- TBS
- T-Motor
- Turnigy
ESC VS empuje
Algunos ESCs pueden generar más empuje que otros con la misma configuración (mismo motor, hélice, voltaje,…) Puede haber una discrepancia de hasta un 20% en el empuje generado entre los variadores más y menos poderosas del mercado. Pero esto no indica tampoco la calidad de la ESC, que puede depender de muchos otros factores (calidad de la construcción, longevidad, rango de voltaje soportado, suavidad, nivel de ruido eléctrico, etc.)
Se puede decir que todos los ESC de buenas marcas tienen una potencia excelente y se comportan similarmente bien, así que no te equivocarás eligiendo entre ellas.
Auto-Timing or Fixed-Timing?
Los dos diferentes enfoques en lo que respecta al Timing del motor son el auto timing y el fixed timing usados tradicionalmente en los variadores de KISS y en los de BLHeli respectivamente.
Tienen algún efecto en el comportamiento y la fiabilidad del ESC y del motor que discutiremos más adelante en el artículo dedicado al Motor Timing
Bootloader
En los días en los que había diferentes opciones de firmware, el bootloader era una aspecto importante a la hora de flashear un ESC. Piensa que es como un pequeño programa que hay que cargar en el variador para permitir después cargarlo y acceder a él de forma más fácil.
Hoy día no necesitamos ni saber lo que es el bootloader, ya que los ESCs siempre vienen con el BLHeli bootloader pre instalado. Los usuarios no tienen que preocuparse por él, sin embargo aquí va un poco de información para el curioso:
Sin el bootloader , tu solo podrías flashear firmware o cambiar la configuración conectándote directamente al chip del procesador.
Tanto SimonK como BLHeli tienen sus propios bootloaders. El de BLHeli tiene más flexibilidad, haciendo que trabajar con él sea más sencillo. Inicialmente se flasheaba el firmware utilizando un interface de un hilo, hoy día básicamente se utiliza el FC como programador.