Los protocolos TX RX de Radio control explicados: PWM, PPM, SBUS, DSM2, DSMX, SUMD
Cuando llegó el momento de comprarte un radiocontrol posiblemente te costó decidirte. Desde que supiste que esto del radiocontrol era una especie de matrimonio en el que estabas obligado a una cierta fidelidad, le estuviste dando vueltas.
Al final algo forzó tu decisión. Quizás fue todo lo que te documentaste, los vídeos que miraste, el presupuesto disponible, tu intuición, o que combinaba con el color de tus ojos, pero optaste por una marca concreta y ahora sólo esperas no haberte equivocado. Tranquilo, no lo has hecho. Si hiciste los deberes y estudiaste, y es un radiotransmisor normal que no ha salido sospechosamente barato, seguro que funciona bien.
Pero por qué un mando de radiocontrol sólo sirve para un tipo de receptores? Es más, por qué los distintos receptores muchas veces se conectan en lugares diferentes de la tarjeta controladora de vuelo? Ello se debe a los diferentes protocolos de comunicación.
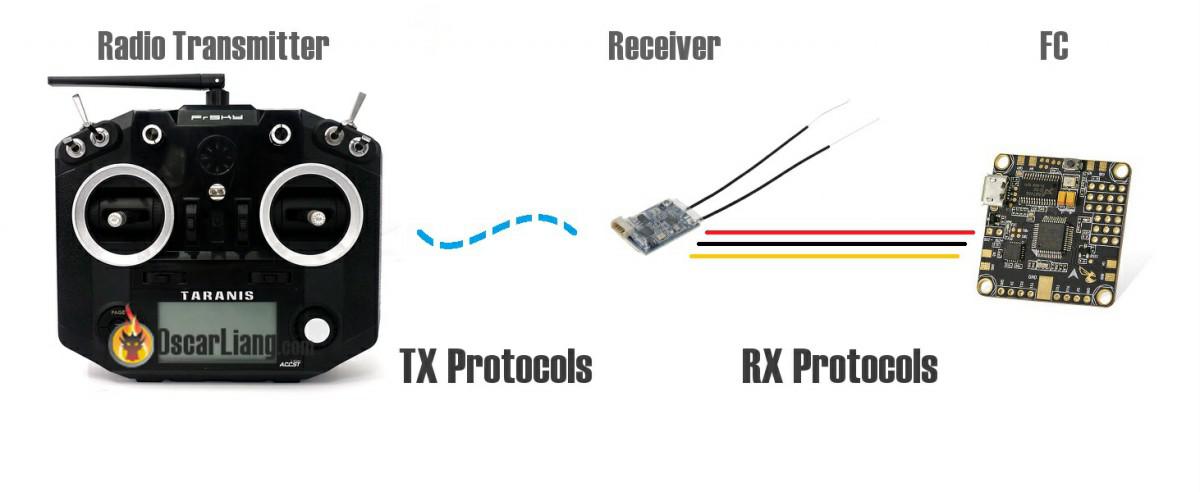
En este post vas a descubrir además que hay dos tipos diferentes de protocolos de comunicación de radio. Por un lado está la comunicación entre tu mando de radiocontrol y el receptor en el aparato, por otro lado, dentro de la máquina, está la comunicación entre el receptor de radio y el controlador de vuelo.

Cuando se trata del radiorreceptor (RX) o del radiotransmisor (TX) todo tipo de acrónimos confusos comienzan a aparecer: PWM, PPM, SBUS, DSMX etc. En este post vamos a explicar la diferencia entre estos tipos de señal RX /TX.
Qué son protocolos TX y protocolos RX?
Estos protocolos de radio pueden ser confusos para los principiantes. Intentaremos explicar sus bases y sus diferencias. También comentaremos algo sobre la tecnología, y cómo ésta hace que volar sea más seguro y confiable.
Los protocolos de radio comunicación que se utilizan en los drones, aviones, cuadracópteros y otros aparatos de radiocontrol, pueden ser divididos en dos grupos:
- Protocolos RX – o protocolos de comunicación entre el RX y el FC
- Protocolos TX – o protocolos de comunicación entre el TX y el RX
Los protocolos TX son mayormente diferentes entre las distintas marcas. Algunas de ellas ofrecen varios protocolos diferentes que dependen del emparejamiento con el radio receptor. Así tenemos por ejemplo:
- D8 (Frsky)
- D16 (Frsky)
- LR12 (Frsky)
- DSM (Spektrum)
- DSM2 (Spektrum)
- DSMX (Spektrum)
- AFHDS (Flysky)
- AFHDS 2A (Flysky)
- A-FHSS (Hitec)
- FASST (Futaba)
- Hi-Sky (Deviation)
Tarjetas Multiprotocolo
Existen en el mercado tarjetas multiprotocolo para radiotransmisores de algunas marcas. Es la filosofía de «un anillo para controlarlos a todos». Y aunque no estamos en Mordor, la verdad es que está muy bien poder controlar desde el Taranis tanto el pequeño Eachine E010 como un Hubsan
PROTOCOLOS RX
Algunos de los protocolos RX son universales en las diferentes marcas de equipos de radiocontrol, pero otros son exclusivos de determinadas marcas, así por ejemplo tenemos:
- PWM (universal)
- PPM (universal)
- PCM (universal)
- SBUS (Futaba, Frsky)
- IBUS (Flysky)
- XBUS (JR)
- MSP (Multiwii)
- SUMD (Graupner)
- SUMH (Graupner)
- CRSF – Crossfire (TBS)
- FPort (Frsky)
PWM – Modulación de la Anchura de Pulso (Pulse Width Modulation)
Éste es al más básico y común de los protocolos de radio control. Antiguamente, cuando sólo había aviones de radiocontrol, los receptores se utilizaban para controlar los servos directamente, con una señal estándar PWM, un canal para cada servo. Todavía hoy, la misma tecnología se sigue usando en muchos modelos. Los multirrotores requieren como mínimo 4 ó 5 canales, en ocasiones más, y en los aparatos con este protocolo verás el mismo número de cables entre el RX y el FC.
PWM es el acrónimo inglés de Modulación de la Anchura de Pulso. Se trata de una señal analógica donde la longitud del pulso especifica la posición del servo o del acelerador. La longitud del pulso normalmente varía entre 1000µs y 2000µs (micro segundos), con 1000µs siendo el mínimo y 2000µs el máximo. Los receptores PWM son a menudo la opción más común y barata, pero debido al enredo con tanto cable, los aficionados hoy día a menudo prefieren PPM o SBUS antes que PWM
PPM – Modulación de la posición del pulso ( Pulse Position Modulation)
PPM es también conocido como CPPM o PPMSUM. La ventaja que tiene el PPM es que sólo necesita un cable de señal para varios canales (típicamente 8 canales como máximo), en lugar de un número de cables individuales. Así que con conectar al RX la tierra, la potencia y el cable de señal es suficiente.
Una señal de PPM es básicamente una serie de señales PWM mandadas una detrás de la otra por el mismo cable, pero la señal es modulada diferentemente.
PPM es lo que llaman “una señal analógica en un dominio de tiempo”, aunque esto puede resultar en ocasiones un poco controvertido. Los canales son enviados uno tras otro y no a la vez, por lo tanto no es tan preciso o libre de saltos como una comunicación Serial, pero está ampliamente difundido y lo soportan muchos FCs.
PCM – Modulación del código del pulso (Pulse Code Modulation)
PCM es el acrónimo en ingles de Modulación del código del pulso. Es un tipo de datos similar al PPM, sin embargo, PCM es una señal digital (usando unos y ceros) mientras que la señal de PPM es analógica y lo determinante es el tiempo en el que la señal está encendida. PCM tiene el potencial de detectar un error en la señal e incluso de corregirlo, pero todo esto depende del producto que compres.
PCM es más confiable y menos susceptible a las interferencias, pero la conversión adicional de la señal a digital hace que el equipo tienda a ser más caro.
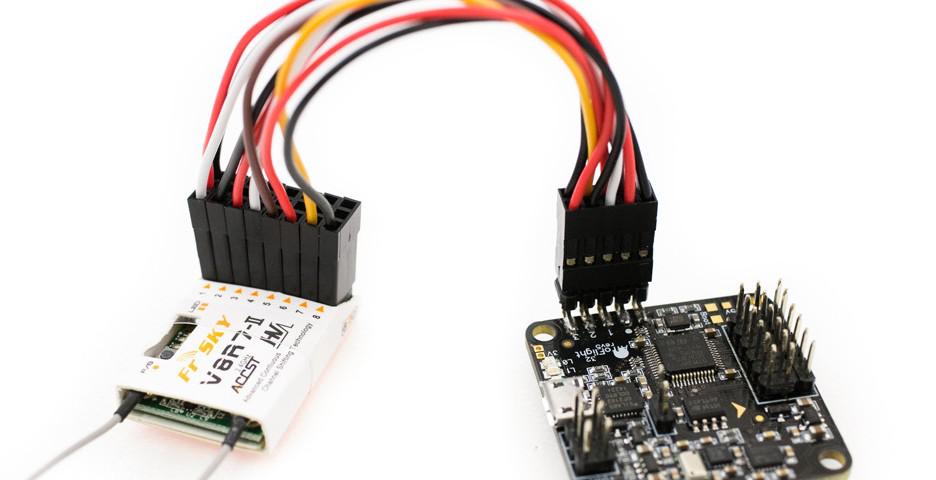
Protocolos Serial
Un protocolo Serial usa sólo tres cables (señal, tierra y potencia) para múltiples canales. Como su nombre sugiere, este tipo de receptor requiere la presencia de un puerto serial en el FC. Éste puede ser de tipo SBUS, XBUS, MSP, IBUS y SUMD.
SBUS (S.Bus, Serial Bus) – de Frsky, Futaba
SBUS es un tipo de protocolo de comunicaciones usado por Futaba y FrSky. Soporta hasta 18 canales usando sólo un cable de señal. SBUS es una señal invertida de UART. Muchos controladores pueden leer una entrada UART, pero no aceptan una invertida, y es precisa una “re-inversión”. Los FCs con F3, F7 y algunos F4 sin embargo, tienen integrado un inversor de señal para este propósito.
CRSF (Crossfire)
CRSF es un nuevo protocolo desarrollado por TBS. Es similar a SBUS o a otro protocolo digital RX a FC. La principal ventaja es un tiempo más rápido de ciclo y de comunicación bidireccional, permitiendo que datos como la telemetría sean incluidos en la corriente de datos sin requerir puertos adicionales. Esto permite al ajuste del FC mediante la radio, así como una señal de telemetría a tu radio control a través del enlace de radio Crossfire.
IBUS de Flysky
IBUS es un nuevo protocolo de control serial de Flysly. Es un protocolo e comunicación bidireccional, lo que significa que puede enviar y recibir datos: un puerto para los datos del servo y un puerto para los sensores.
XBUS de JR
XBUS , usado por JR es un protocolo que soporta hasta 14 canales en un solo cable. Su ventaja es el pequeño desfase de tiempo entre canal y canal.
MSP ( Multiwii Serial Protocol)
Este protocolo fue creado como parte del software multiwii. Básicamente te permite usar comandos de MSP como la entrada de radiocontrol, y soporta hasta 8 canales en un solo cable.
SUMD de Graupner Hott
El SUMD de Graupner es un protocolo serial como el Speksat y el SBUS. Los canales son codificados en una señal digital y no tiene una latencia notable. Las ventajas el SUMD son que comparado con SBUS no necesita una inversión de señal, y que comparado con PPM, el SUMD tiene mayor resolución, ya que el PPM sólo tiene 250 pasos y siempre una fluctuación de 4ms.
SumH de Graupner
SumH es el protocolo anterior de Graupner. En las actualizaciones de firmware se les permite correr SUMD.
FPort
Fport es el nuevo protocolo RX creado por los desarrolladores de Frsky y Betaflight. Combina tanto la señal de control como la telemetría en un solo cable, lo que lo hace más compacto y fácil de manejar.
No está invertida como SBUS y SmartPort así que debería ser compatible con los FCs que tengan F4 sin inversores de hardware.
F-Port está aún en una etapa muy joven de su desarrollo, así que dejaremos la información sobre el Fport para más adelante.
Qué protocolo de recepción debería usar?
Lo primero de todo, depende de tu radiotransmisor. Posiblemente, lo preferible sea PPM o SBUS para los multicópteros en general por el cableado más sencillo, y para las carreras de drones en concreto SBUS debido a su latencia mínima.
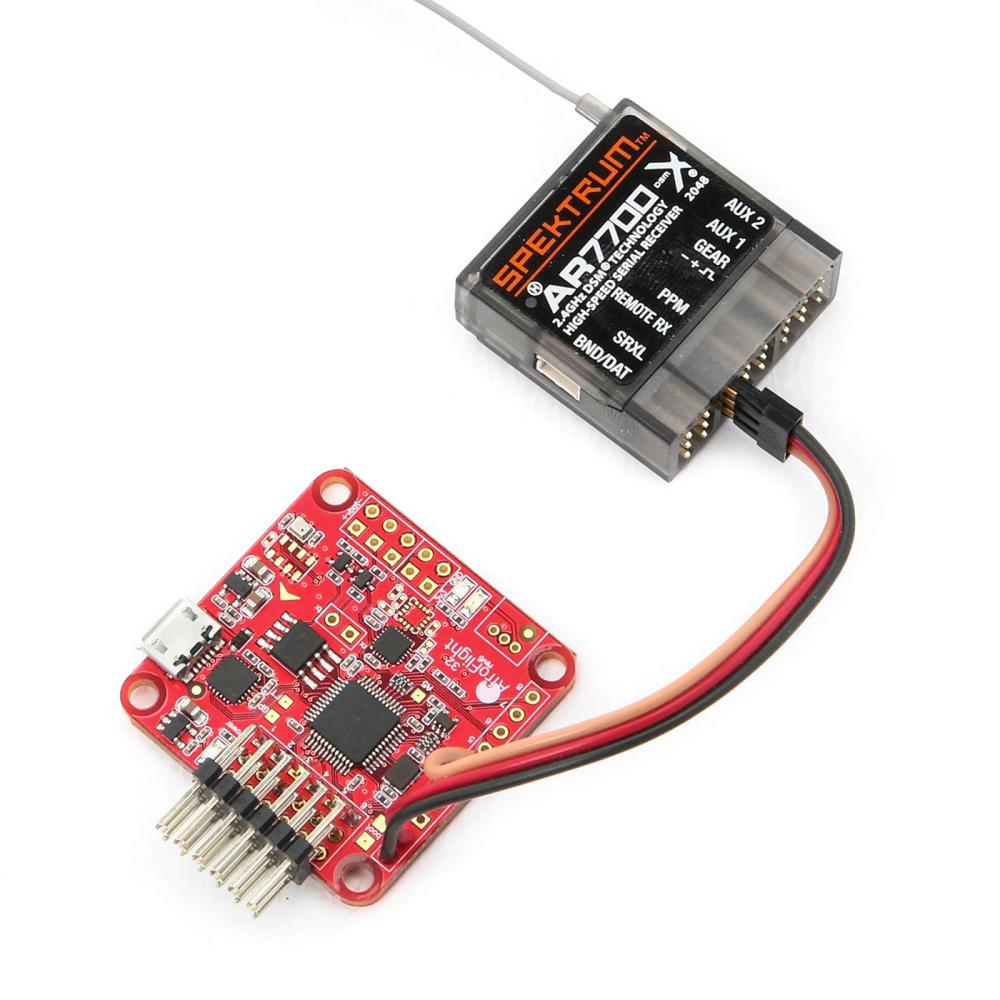
Protocolos TX de Spektrum: DSM2 y DSMX
Hasta ahora, hemos estado hablando de los protocolos RX a FC. Los protocolos DSM2 y DSMX de Spektrum, una marca de radiocontrol especializada en productos de radio, son protocolos de radio entre TX y RX. Los protocolos RX a FC de Spektrum se llaman SPEKTRUM1024 y SPEKTRUM2048 para el DSM2 y el DSMX respectivamente.
DSM2 y DSMX de Spektrum
La señal DSM2 es más resistente al ruido, a interferencias de otros radiotransmisores emitiendo en la misma frecuencia. También encuentra una frecuencia de respaldo en caso de que la frecuencia primaria falle. Esto disminuye la posibilidad de pérdida de la señal, pero si ambos canales fallasen todavía puedes perder la conexión.
El DSMX se basaba y mejoraba al DSM2. Ambos usan el mismo esquema de codificado. La diferencia es que el DSMX es capaz de cambiar a una nueva frecuencia en un par de mili segundos su pierde el enlace, así que en teoría no serías capaz ni siquiera de advertirlo.
DSM2 es todavía una tecnología popular que funciona muy bien si estás alejado de fuentes de radio interferencia (como WIFI, microondas, o cámaras de seguridad inalámbricas). El DSMX es sin embargo, más confiable.
Spektrum Satellite
El Spektrum Satellite es una antena y un circuito receptor adicional que normalmente se conecta al receptor principal para mejorar la fiabilidad de la recepción proporcionando diversidad en la misma.
Protocolos de TX Frsky
Dependiendo de qué módulo y receptor Frsky se utiliza, se requieren distintos protocolos:
- D16 para los receptores de la serie X: X4R-SB, XSR, X8R
- D8 para los receptores de las series D y V: D4R-II, D8R-II+, V8FR-II, VD5M, etc
- LR12 para el receptor de largo alcance L9R
Latencia de los protocolos TX y RX
Dronemesh en youtube ha estado haciendo pruebas de latencia para distintos protocolos. Este es el resultado que arroja una de sus pruebas según uno de sus vídeos:
- Flysky i6X – 13.7ms
- Turnigy Evolution – 14.6ms
- Crossfire (on X10) – 19.5ms
- Frsky Horus X10 – 31.5ms
- Frsky QX7 – 36.3ms
- Spektrum DX6i – 41.5ms
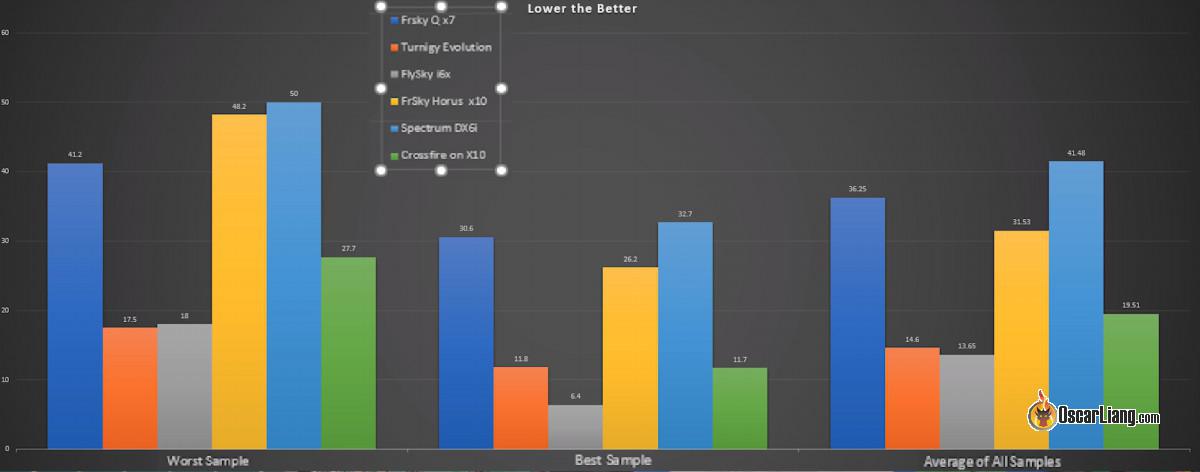
Por supuesto, cuanto más baja sea la latencia es mejor, pero no creo que ésta debería ser la razón fundamental para elegir la radio. Deberías considerar también la fiabilidad de la conexión, las funciones que ofrece la radio, etc. Pueden 15 mili segundos de latencia afectar el vuelo de alguien? Puede que si, puede que no.