Objetivos
Material requerido.
 |
Robot Rover 4×4 |
Montaje del chasis
Aunque el kit del Rover 4×4 contiene una hojita con las instrucciones para montar el chasis del coche y colocar los motores en él, vamos a desarrollarlo en profundidad en esta sesión para que nadie tenga ningún problema al hacerlo. Además vamos a colocar el Arduino, la controladora y el soporte para las pilas; y a conectarlo todo incluyendo los motores.
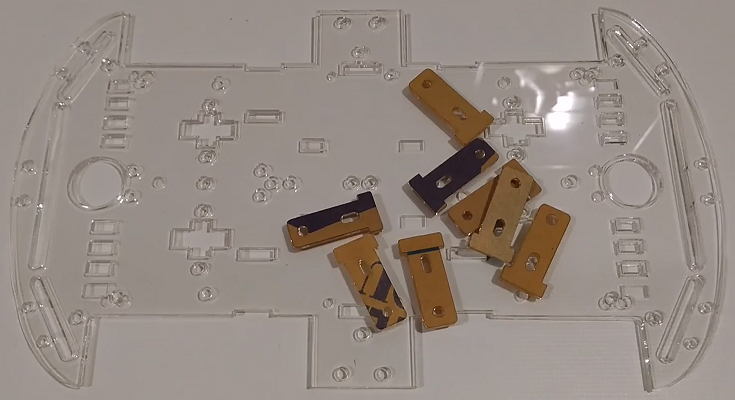
Lo primero que vamos a hacer es quitar las pegatinas protectoras de todas las piezas de metacrilato. Tiene que haber 10, 2 grandes para la estructura del chasis y 8 pequeñas que sirven para sujetar los motores. En realidad no hay por qué quitarlas, pero el Rover quedará mucho más presentable si lo hacéis.
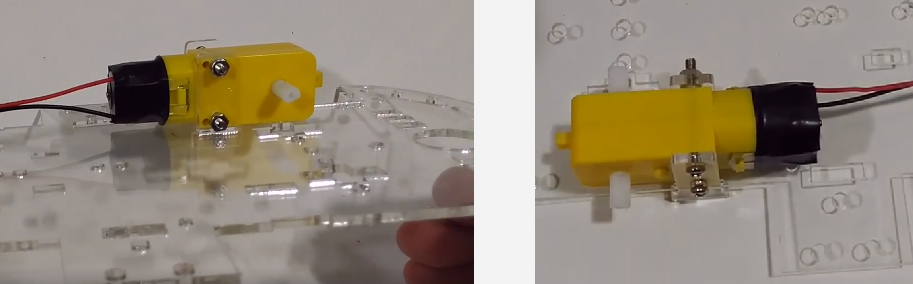
Lo siguiente que vamos a hacer es sujetar los motores. Para ello cogemos una de las piezas grandes y todas las pequeñas. Utilizaremos dos de estas últimas para cada motor. Primero meteremos la de la parte interior en el agujero y colocamos el motor pegado a ella por la parte más exterior. Tenemos que asegurarnos de que los cables queden hacia la parte interior del coche y de que el cable rojo del motor queda hacia arriba, hacia el lado más alejado de la pieza grande del chasis.
A continuación cogemos la otra pieza pequeña y uno de los tornillos largos. Atravesamos esta pieza por el agujero más largo de los dos, el que está más pegado a la parte ancha de la pieza y por el agujero de abajo del motor hasta atravesar la segunda pieza de metacrilato para sujetar el motor. A continuación le colocamos una tuerca. No la apretéis mucho para que nos sea sencillo colocar el otro tornillo. Ahora colocamos el tornillo de arriba de la misma forma y apretamos ya ambas tuercas.
Tendremos que repetir esta misma operación otras tres veces para colocar el resto de los motores. Cuando los tengáis bien sujetos podéis ir poniendo las ruedas. Fijaros que el enganche es rectangular (más o menos), así que sólo engancha en dos posiciones. No tiene mayor misterio, pero veréis que ahora ya empieza a tomar forma el robot.
Cogemos las 6 piezas metálizas que sirven como separadores para sujetar el otro piso del chasis y las colocamos en los agujeros que podéis ver en la foto. Fijaros que tienen que ir hacia el lado que están los motores, para montar el segundo piso sobre ellos. Los sujetamos con tornillos a la parte que ya tenemos montada.
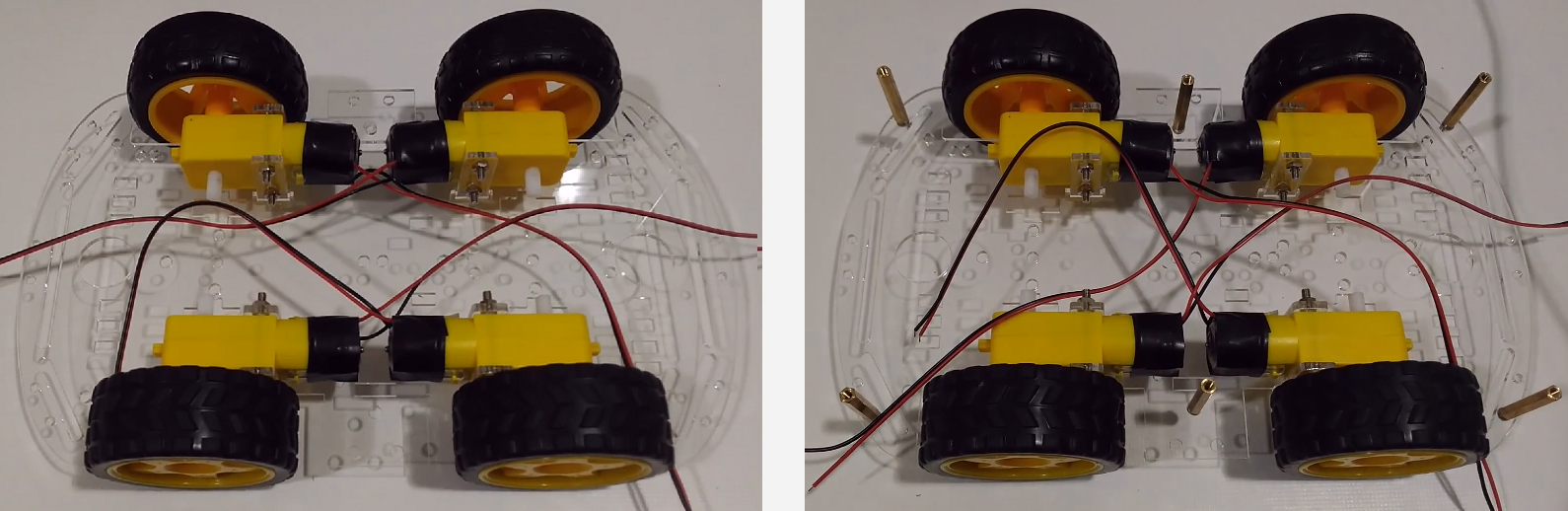
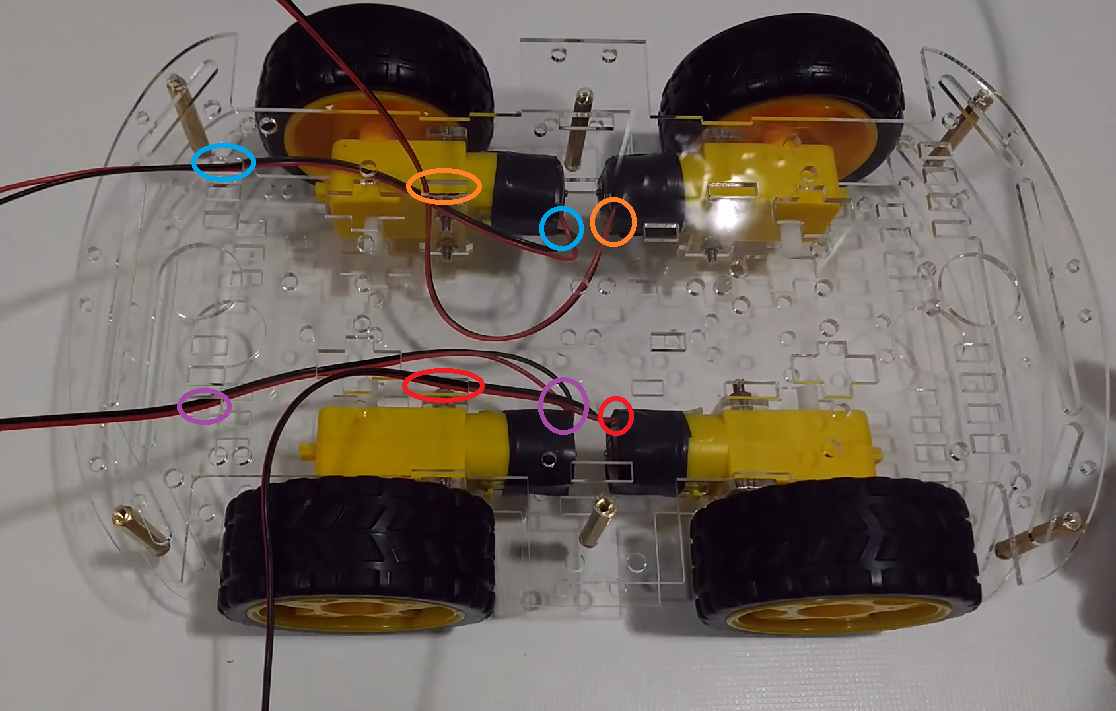
Colocamos el segundo piso y lo colocamos sobre los separadores, pero de momento no lo atornillamos para que podamos pasar los cables más fácilmente. Pasamos los cables de los motores de forma ordenada, como veréis en la foto. En el vídeo quizás os quede más claro como hacerlo. Una vez hecho ya podemos atornillar también esta parte.
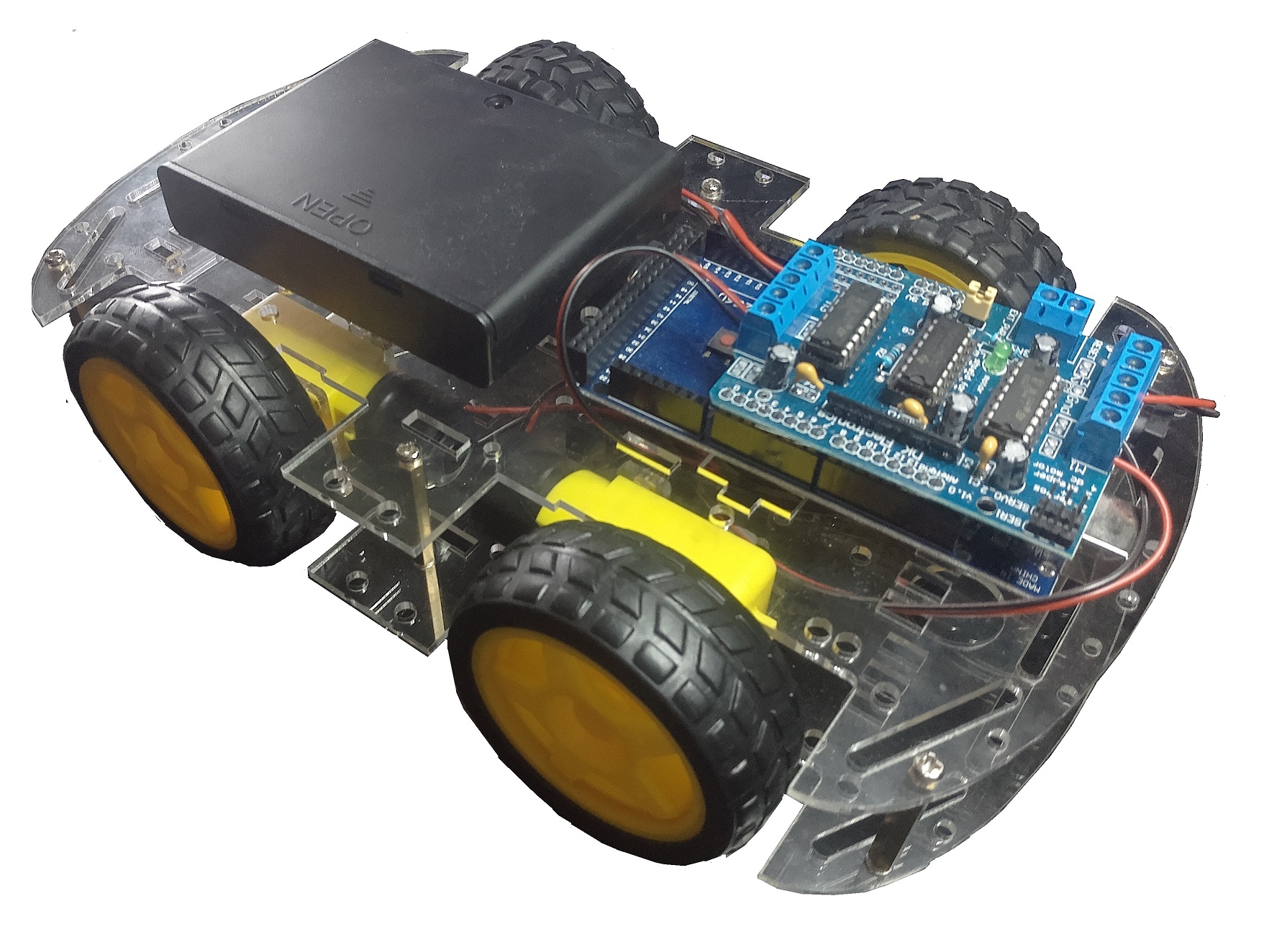
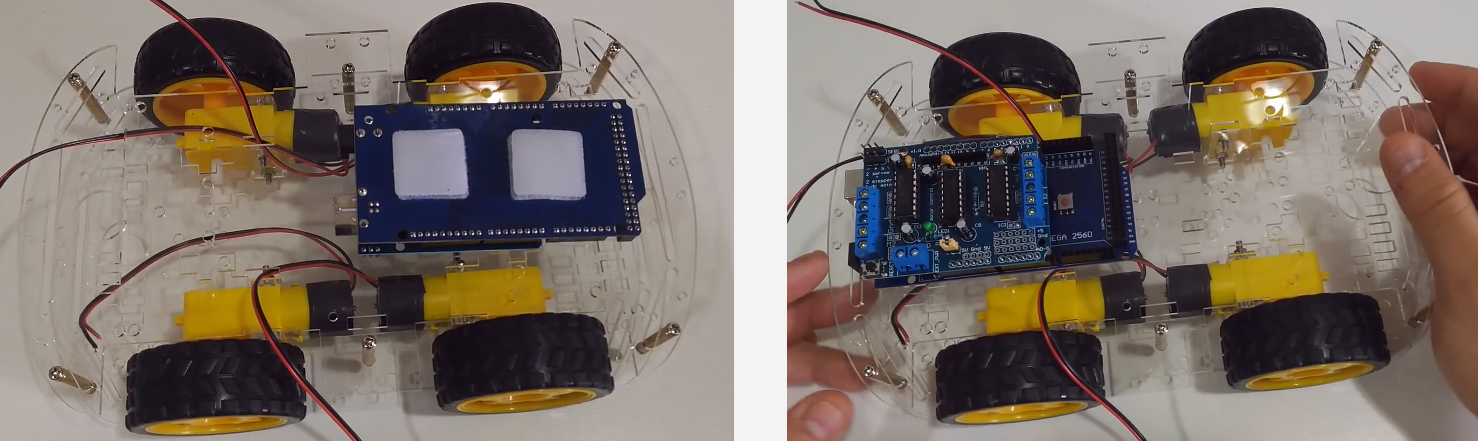
Vamos a empezar a colocar la electrónica. Para ello primero vamos a enganchar el shield al Arduino. No es complicado, porque sólo encaja correctamente en una posición. Hay que fijarse bien que todos los pines del shield entren en el Arduino. Después vamos a utilizar un pal de parejas de cuadrados de velcro para pegarlo al chasis del robot. Lo vamos a colocar entre los cables, con la toma USB mirando hacia la parte exterior del coche para poder cargarle los programas sin problemas.
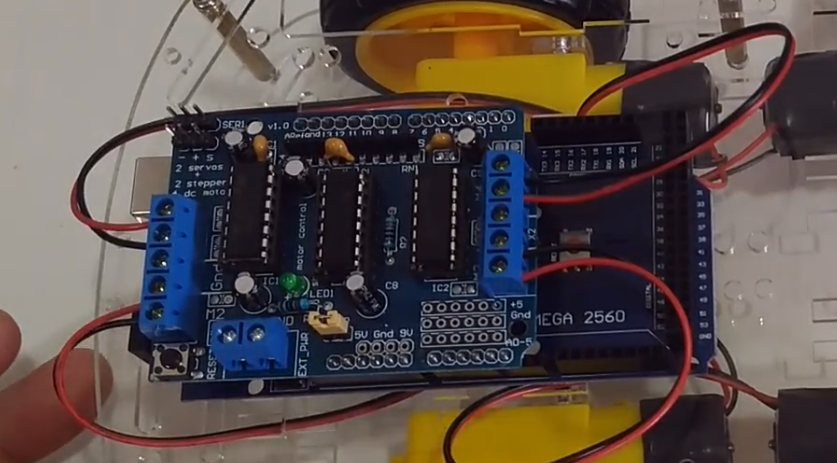
Ya podemos conectar los cables de los motores al shield. Los hemos dejado cerca de las conexiones en el apartado anterior, a las que debemos conectarlos en pares de cables rojo-negro en cada una de las tomas marcadas de M1 a M4. El orden en que conectemos los cables rojo y negro hará que los motores giren en uno u otro sentido. Si queréis hacerlo igual que nosotros, y aseguraros de que al programarlo para que vaya para delante realmente lo haga, conectadlos como en esta foto:
Ya podemos colocar y conectar el soporte para las pilas. Vamos a hacerlo de forma que la palabra open quede hacia arriba, y pegado a la placa Arduino para dejar espacio en la parte de delante para colocar, más tarde, el sensor de distancia. Para sujetarlo utilizaremos de nuevo un par de velcros.
Y para terminar vamos a conectarlo al shield. Utilizaremos el conector que tiene la placa en un lateral, donde tenemos marcado M+ y GND. Aquí sí que hay que fijarse bien o podéis quemar la placa. Tenemos que conectar el cable rojo a M+ y el negro a GND.
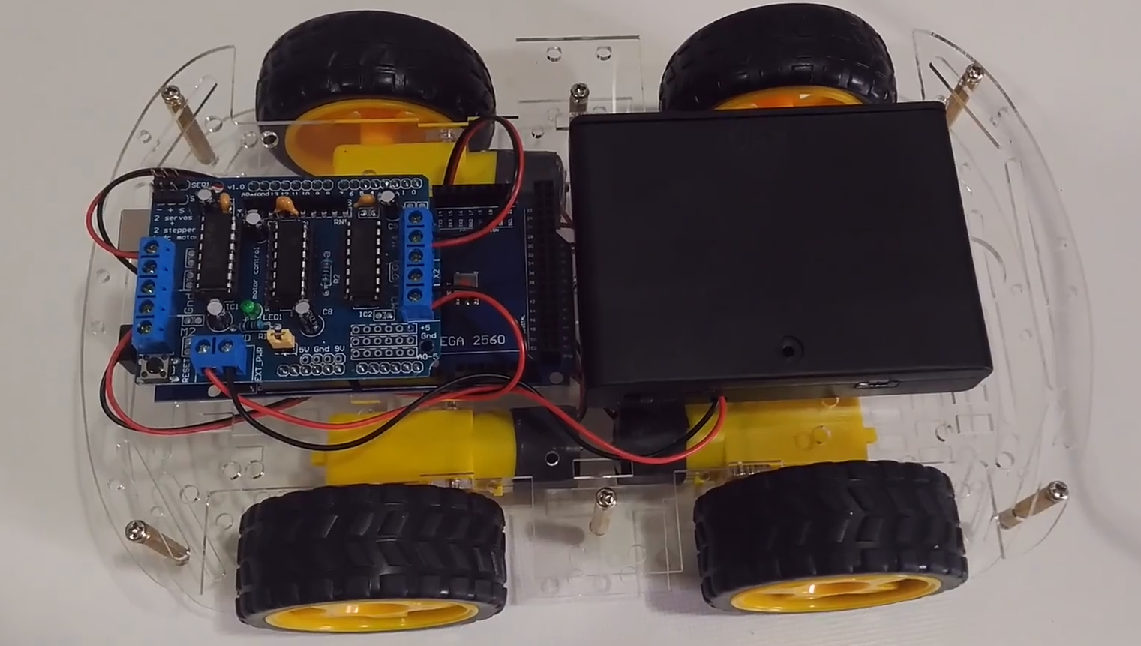
Con esto tenemos el robot listo para empezar a programarlo y a conectarle más cacharros. Os dejamos un vídeo para que veáis como lo hemos montado nosotros, por si os puede ayudar.
Resumen de la sesión
En esta sesión hemos aprendido varias cosas importantes: