Montaje del Rover 4×4
Queremos empezar una serie de tutoriales que se centren por completo en el Robot Rover 4×4 que tenemos disponible en Prometec. Nos parece que es de lo más completo y divertido, y con los componentes que incluye el kit podemos hacer un robot autónomo con sensor de distancia o un coche teledirigido por Bluetooth desde el teléfono móvil. El kit incluye todo lo necesario para montarlo y programarlo, y no hay que soldar ningún componente.
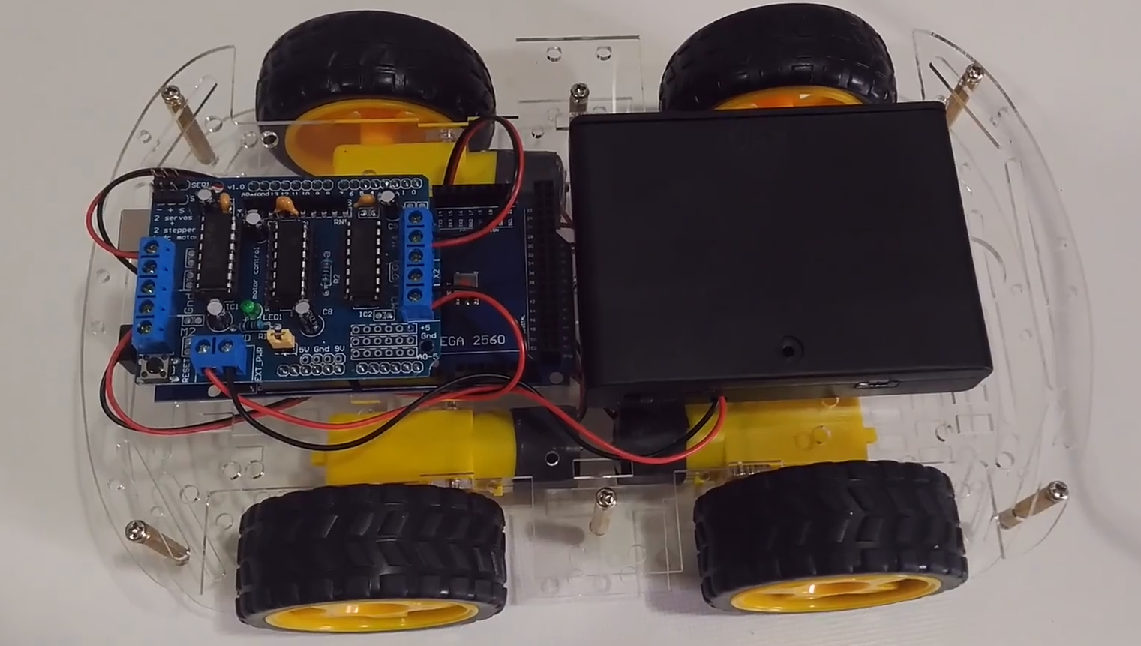
Pero siempre hay que empezar desde el principio, y con ese motivo os traemos esta sesión en la que aprenderemos a montar el Rover 4×4 y a colocar y conectar los motores, la alimentación, el Arduino y el shield de motores.
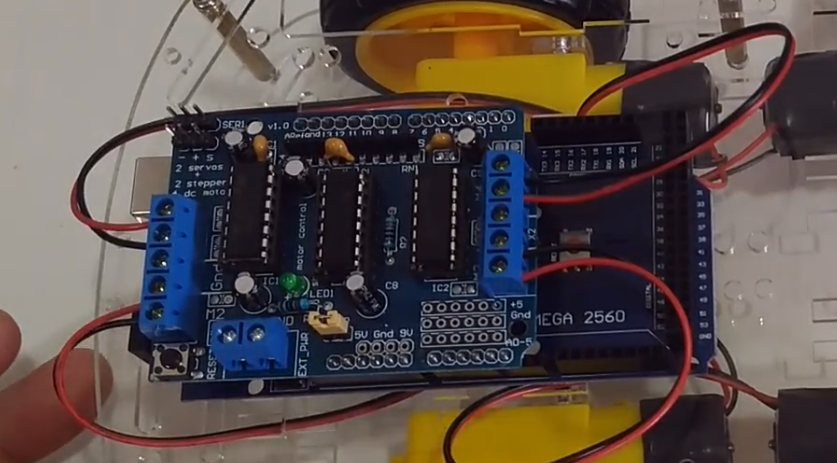
En realidad el kit trae consigo unas instrucciones para montar el chasis y colocar los motores, pero hemos querido profundizar lo máximo para que nadie encuentre problemas a la hora de avanzar. Además hemos incluido un vídeo para que veáis como lo hemos montado nosotros.
A partir de aquí nuestra intención es hacer varios tutoriales, tanto en C++ con el IDE, como con bloques en mBlock para que podáis elegir lo que más se adecue a vuestras necesidades. Aquí tenéis el enlace a la sesión:
Así que esperaros veros pronto por aquí, cuando publiquemos el siguiente tutorial respecto al Rover 4×4. O en cualquiera de los otros temas que nos gusta tratar por aquí. Un saludo desde Prometec y hasta la próxima.
