Objetivos
Material requerido.
<
 |
Arduino Uno o compatible y con el firmware para S4A cargado. |
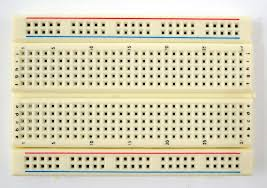  |
Una Protoboard más cables. |
 |
Ardumoto Shield |
Esta sesión es poco mas que una traducción libre de la página de Sparkfun Ardumoto Hookup guide
Más sobre motores de CC
Ya vimos en varias sesiones anteriores como manejar motores de corriente continua (CC) directamente mediante señales PWM y también como usar un sistema un poco más cómodo para manejar 4 motores mediante el Motor Shield V1.
Vimos que este Motor Shield V1, era cómodo y práctico para mover hasta 4 motores CC, y la pregunta es entonces ¿Por qué ver más chips / Shields de control de motores?
La realidad es que el Motor Shield V1 es un juguete esplendido para iniciaros con el control de motores en Arduino y por muy poco dinero, pero enseguida encontrareis que este Shield V1 está un poco limitado por la intensidad máxima que toleraba en su diseño, y que no podía sobrepasar 0,6 Amp, lo que no da para mucho en cualquier proyecto en el que tengáis que usar motores de continua con algo más de consumo.
En cuanto empecéis a buscar motores de una cierta potencia veréis que el consumo se dispara con rapidez impidiendo usar drivers sencillos como los que hemos visto hasta ahora.
Por eso el mercado, siempre atento a las oportunidades, nos brinda otras soluciones cuando la carga a mover crece, y una solución es utilizar drivers cuya capacidad de carga sea un poco superior.
No es difícil encontrar chips y Shields para Arduino que resuelven este problema, pero la documentación suele ser el primer defecto de muchas de estas soluciones (Por su inexistencia) y el precio puede crecer muy rápidamente sino se elige con cuidado.
Por eso, entre las muchas soluciones disponibles, hemos optado por presentaros un chip típico para estas ocasiones, el L298, que es muy interesante porque nos permite gobernar dos motores de continua, con una carga de hasta 2 Amperios por cada uno, e incluye todo lo necesario para invertir la dirección de movimiento de estos y para controlar la velocidad de giro. Todo en un único chip.
Es muy frecuente encontrar este chip gobernando pequeños robots de dos ruedas y en esta sesión presentaremos este chip L298y también un Shield llamado Ardumoto que nos permitirá controlar con comodidad un par de motores de corriente continua de un modo conveniente sin necesidad de grandes desembolsos.
Full-Bridge Motor Driver Dual
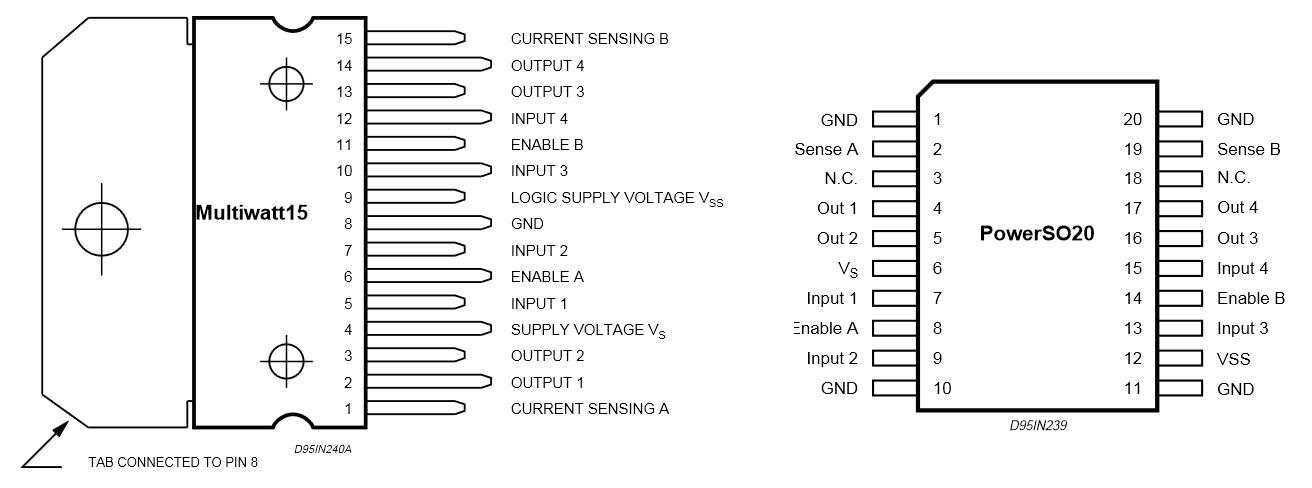
Vamos a empezar viendo un poco las características del L298. Básicamente este chip es un controlador doble full bridge, es decir que permite manejar dos motores (De corriente continua o de paso a paso) y controlar tanto la velocidad como el sentido de giro de ambos motores.
Se presenta en dos versiones, en formato para soldar a una PCB (O protoboard) y en formato SMD, de soldadura en superficie que resulta un poco más complicado de soldar en casa:
Según su data sheet, puede entregar hasta 50V a los motores manteniendo 2Amp de carga y hasta 3Amp de pico (Que mejor no sea sostenido, si os gusta vuestro chip)
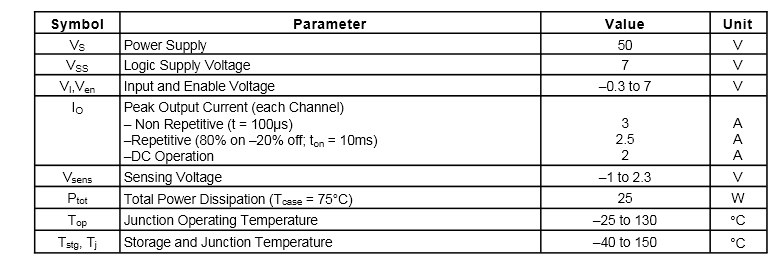
2 Amperios sostenidos es ya un consumo medio y con una cierta capacidad para desarrollar trabajo, por lo que este chip es muy apreciado en esos pequeños proyectos que tienen que mover por ejemplo un par de ruedas, o elevar un cierto peso. También se recomienda si tenéis que excitar solenoides o relés de un cierto tamaño cuyo consumo excede los mínimos que hemos visto hasta ahora.
Por eso os lo encontrareis una y otra vez en diferentes proyectos Arduino, porque es un chip competente, muy extendido y de precio moderado, y en muchas ocasiones se encuentra ubicado en un Shield como el que vamos a usar en esta sesión…
Ardumoto Shield
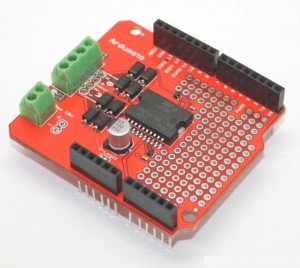
La manera más cómoda de usar este chip es mediante un pequeño shield que nos permita conectarlo a nuestros Duinos, sin demasiada complicación y el Ardumoto Shield es uno diseñado con esa intención. Originalmente diseñado por SparkFun, ha sido rápidamente copiado por los fabricantes chinos que ofrecen replicas directas del mismo.
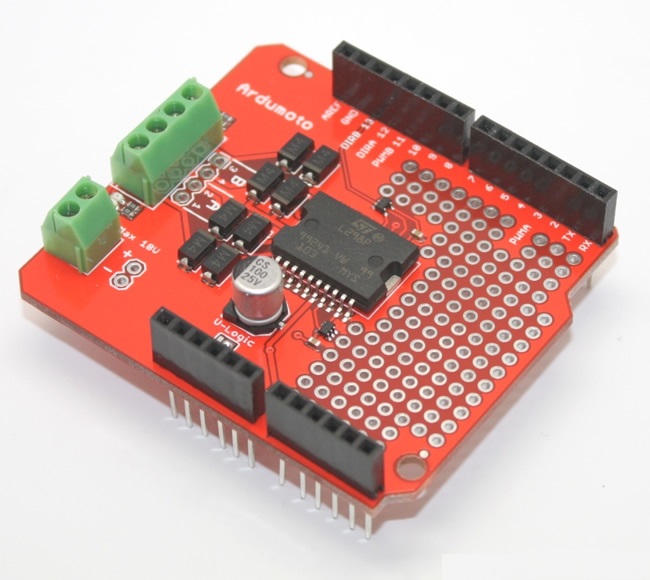
Incluye dos únicos bridge, lo que nos limita a dos motores CC o a un único paso a paso, pero a cambio tenemos todo el control mediante pines directos de Arduino.
También podéis apreciar que dispone de una pequeña área de pruebas y prototipos, donde podréis soldar componentes adicionales, como LEDS, Bluetooth o WIFI o cualquier otra cosa que se os pueda ocurrir, y que siempre viene bien cuando montas motores.
El shield utiliza 2 pines de Arduino para controlar cada motor. Uno regula la dirección de giro y el otro la velocidad mediante una señal PWM, lo que hacen un total de 4 pines dejando libres el resto.
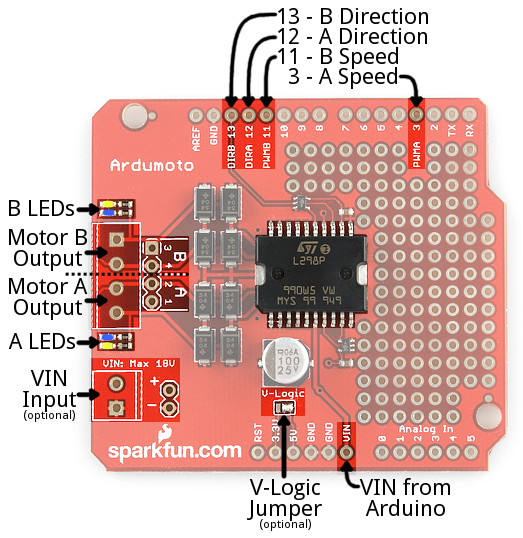
El Ardumoto Shield se reserva los pines 12 y 13 para controlar la velocidad, y los pines 3 y 11, para controlar el sentido de giro de los motores A y B respectivamente.
| Pin Arduino | Uso | Notas |
|---|---|---|
| 3 | PWM Motor A | Valores de 0 a 255 |
| 11 | PWM Motor B | Valores de 0 a 255 |
| 12 | Sentido Motor A | Es un Bool True / False |
| 13 | Sentido Motor B | Es un Bool True / False |
A mano izquierda podéis ver las conexiones para los motores A y B, así como un conector para alimentar los motores independientemente de la alimentación de Arduino.
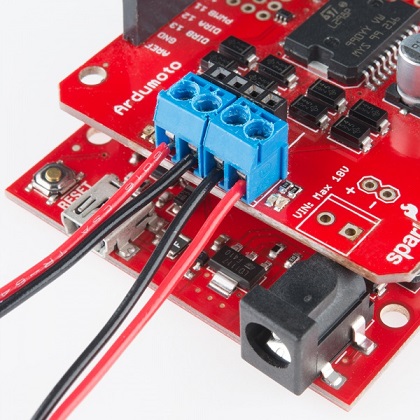
No tiene demasiada importancia en qué orden conectáis los cables de los motores, siempre y cuando lo tengáis claro. Os recomiendo que os fijéis en los colores de los cables y conectéis ambos pares de igual modo para evitar sorpresas.
Fijares también, que a los laterales de donde conectamos los motores hay un par de LEDs de colores que indican el estado del motor y su sentido de giro (En el video del final se aprecian bastante mejor).
EL programa de control
El shield Ardumoto usa simplemente los pines de control que mostramos en la tabla más arriba, por lo que no requiere ninguna librería especial para mover los motores sino que usamos Arduino y sus pines para controlar el L298N y por tanto la velocidad y sentido de los motores conectados.
El programa que nos presenta SparkFun es de lo más sencillo y le vamos a usar como ejemplo de control. Empezamos con algunas definiciones para implicar el programa:
#define CW 0 //Sentido ClockWise #define CCW 1 //Sentido Counter ClockWise #define MOTOR_A 0 #define MOTOR_B 1 const byte PWMA = 3; // PWM control (speed) for motor A const byte PWMB = 11; // PWM control (speed) for motor B const byte DIRA = 12; // Direction control for motor A const byte DIRB = 13; // Direction control for motor B
Y ahora vamos a definir un par de funciones sencillas de manejo. La primera la usaremos para arrancar uno de los motores con un sentido y velocidad dados:
void driveArdumoto(byte motor, byte dir, byte spd)
{ if (motor == MOTOR_A)
{ digitalWrite(DIRA, dir);
analogWrite(PWMA, spd);
}
else if (motor == MOTOR_B)
{ digitalWrite(DIRB, dir);
analogWrite(PWMB, spd);
}
}
Y la segunda es aún más sencilla, para parar el motor:
void stopArdumoto(byte motor)
{ driveArdumoto(motor, 0, 0); }
Y como tenemos que programar los pines, porque no tenemos una librería que nos haga el trabajo sucio, podemos definir una función que lo haga:
void setupArdumoto()
{ pinMode(PWMA, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(DIRA, OUTPUT);
pinMode(DIRB, OUTPUT);
digitalWrite(PWMA, LOW);
digitalWrite(PWMB, LOW);
digitalWrite(DIRA, LOW);
digitalWrite(DIRB, LOW);
}
EL resto del programa tiene poco mérito. Básicamente vamos llamando a Ardumoto() para hacer girar los motores en diferente sentido y con distinta velocidad.
No pretende ser más que un pequeño ejemplo de como podéis realizar el control de los motores conectados al Ardumoto Shield.
void loop()
{ // Mueve solo el Motor A, a diferentes velocidades
driveArdumoto(MOTOR_A, CCW, 255); // Motor A, avance a toda maquina
delay(1000); // Motor A girará 1 segundo
driveArdumoto(MOTOR_A, CW, 127); // Motor A, avance a media potencia
delay(1000);
stopArdumoto(MOTOR_A); // Parar Motor A
// Mueve solo el Motor B a varias velocidades
driveArdumoto(MOTOR_B, CCW, 255); // Motor B, retoceso a toda maquina
delay(1000);
driveArdumoto(MOTOR_B, CW, 127); // Motor B, avance media
delay(1000);
stopArdumoto(MOTOR_B); // Para Motor B
// Ahora girar ambos motores
driveArdumoto(MOTOR_A, CW, 255); // Motor A avance toda
driveArdumoto(MOTOR_B, CW, 255); // Motor B avance toda
delay(1000);
// Ahora retroceso a media maquina
driveArdumoto(MOTOR_A, CCW, 127); // Motor A at max speed.
driveArdumoto(MOTOR_B, CCW, 127); // Motor B at max speed.
}
Y solo nos queda un pequeño video mostrando el resultado final:
Resumen de la sesión