S4A Y EL CONTROLADOR DE MOTORES L298N
Llevamos varias sesiones de dedicadas a componentes que están más orientados hacia la robótica, teniendo en mente incluir en nuestra página un Curso de Robótica Educativa tanto para el IDE
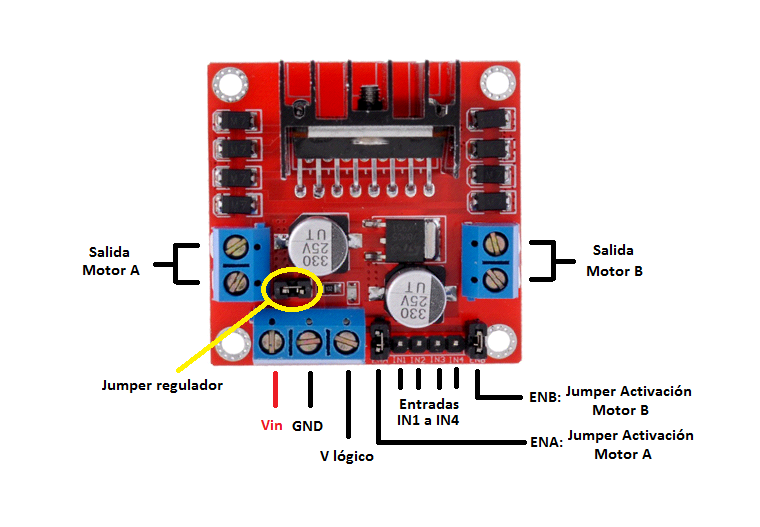
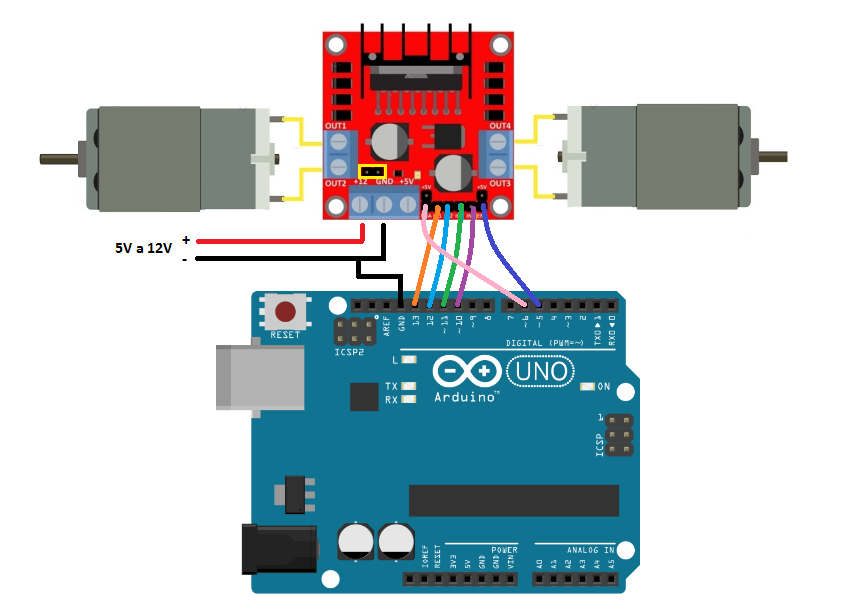
MÓDULO CONTROLADOR DE MOTORES L298N
Hace unas semanas nos planteamos comenzar una serie de tutoriales que culminen en la construcción de un coche al que pudiéramos incluir distintas funcionalidades: manejarlo con el Bluetooth del móvil,
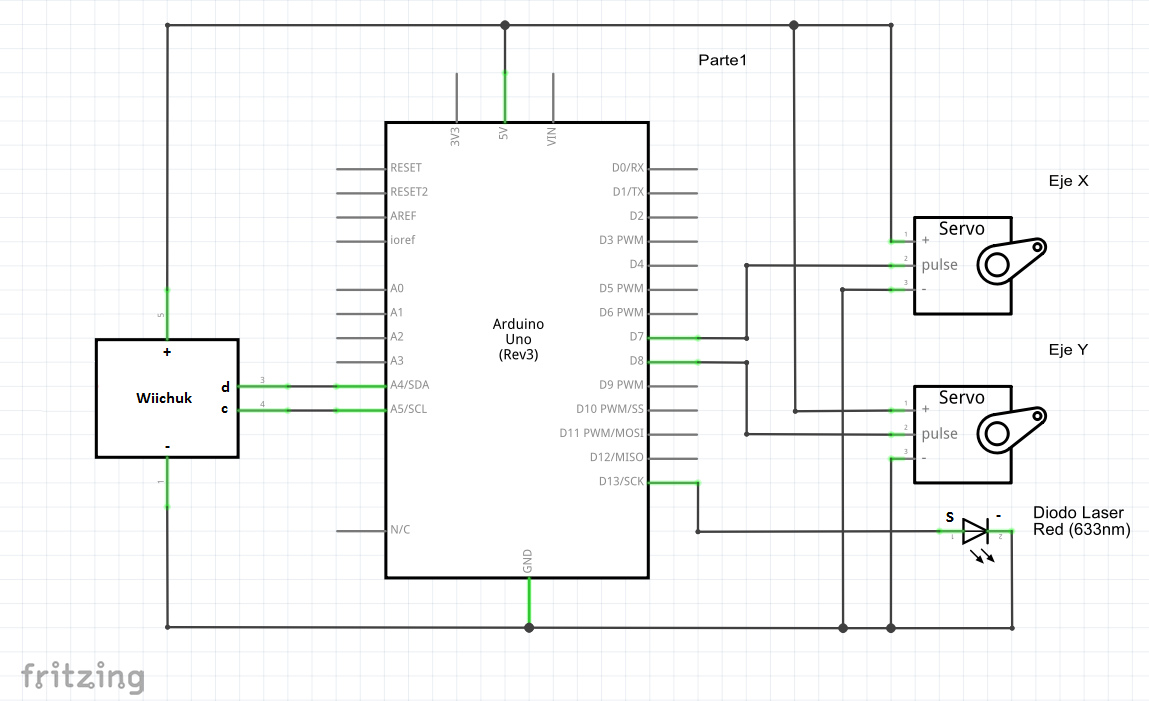
Brazo robot, Nunchuk y láser
Seguimos trabajando con el brazo robótico, y en esta ocasión vamos a aprender a controlar su posición utilizando simplemente el movimiento de nuestra mano. Y para ello vamos a utilizar
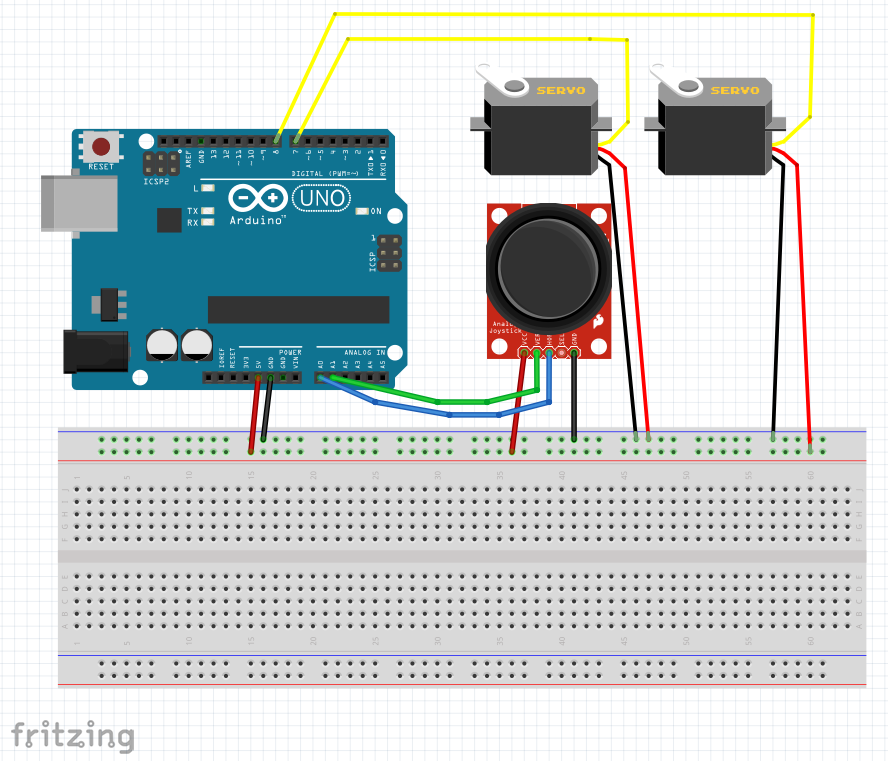
Brazo robótico y joystick
Si hace unos días le publicamos la sesión en la que aprendíamos a controlar el brazo robótico de dos ejes con un joystick utilizando S4A, hoy le toca al turno
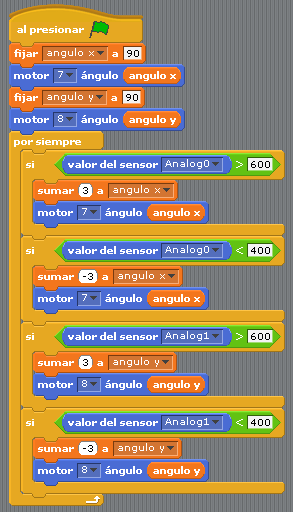
S4A: Brazo robótico y joystick
Ahora que ya hemos montado el brazo robot podemos empezar a trabajar con él. Y en este caso presentamos una sesión en la que aprenderemos a manejarlo con un joystick y

Brazo robótico de dos ejes
Presentamos una nueva serie de tutoriales en los que trabajaremos con un brazo robótico de dos ejes. Esta primera sesión la vamos a dedicar a explicar cómo montar el brazo robot. De
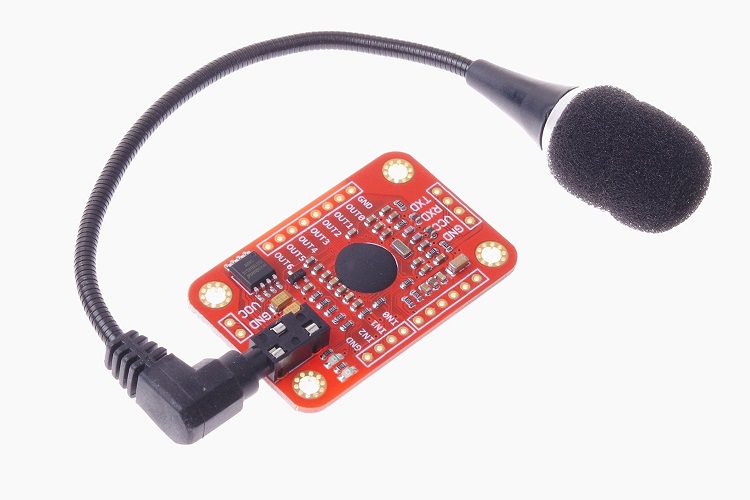
Reconocimiento de voz
Seguro que quien más y quien menos hemos «hablado» con algún dispositivo electrónico, esperando que en su infinita obediencia, acceda a cumplir nuestra petición (dentro de un orden evidentemente). Probablemente lo primero que se
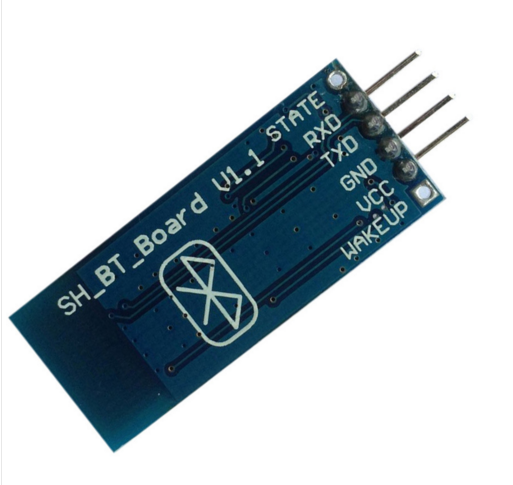
S4A y el Bluetooth
Llevamos ya bastantes sesiones de S4A y hasta ahora hemos aceptado que una de las limitaciones que tiene esta herramienta es que hay que tener siempre conectado el Arduino al PC, dando
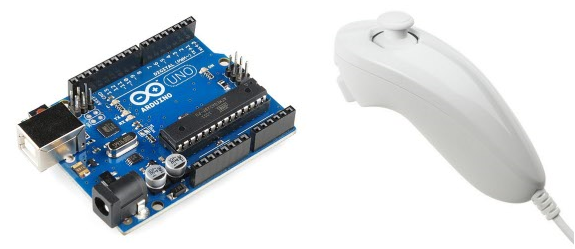
Arduino y el Nunchuk de la Wii
Comenzamos con una nueva serie de tutoriales acerca de un periférico que creemos que va a dar mucho juego en vuestros proyectos, sobre todo en aquellos que estén enfocados a
GPRS: Conexión a Internet
Seguimos con esta serie de tutoriales dedicados al módulo GSM/GPRS SIM900, y en esta ocasión lo haremos centrándonos en la conexíon a Internet, que nos consta que suscita bastante interés, ya