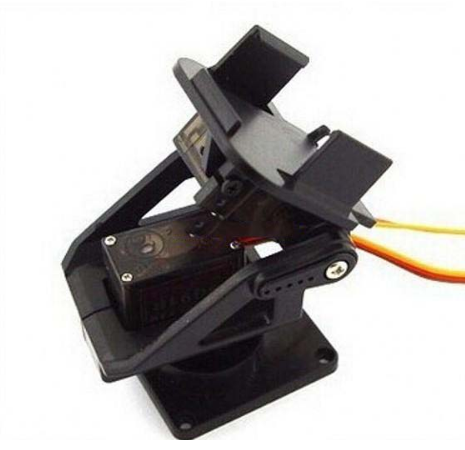
Brazo robótico y joystick
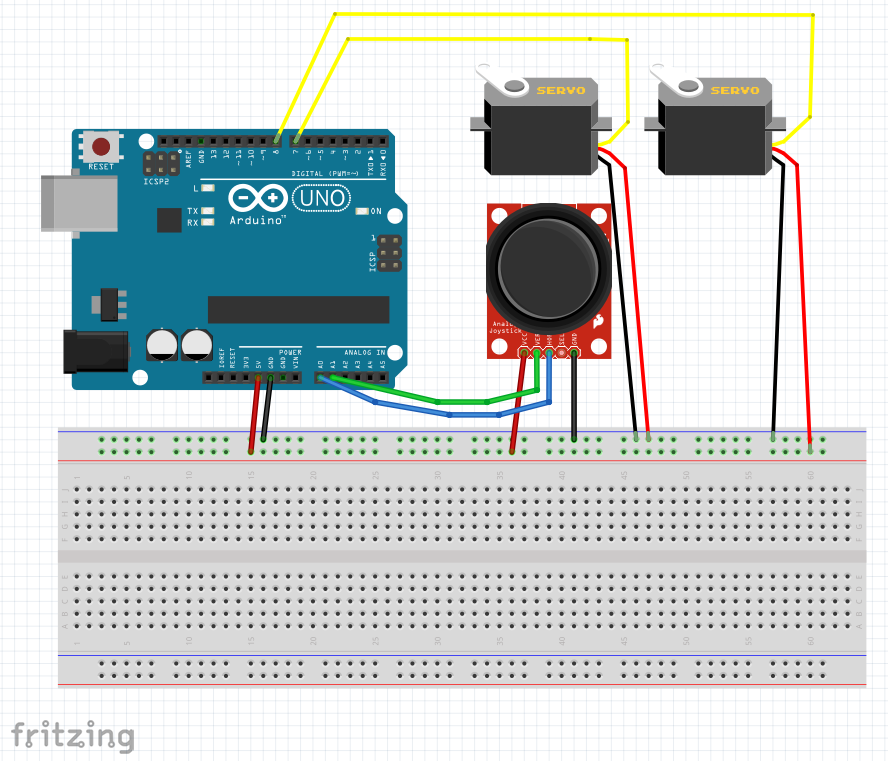
Si hace unos días le publicamos la sesión en la que aprendíamos a controlar el brazo robótico de dos ejes con un joystick utilizando S4A, hoy le toca al turno a la respectiva sesión utilizando el IDE.
Igual que hicimos con S4A, no vamos a extendernos mucho porque todo lo que vamos a hacer ya lo hemos hecho anteriormente, y únicamente va a ser avanzar un poquito más en el manejo del joystick y los servos. Pero eso sí, aconsejamos haber leído antes las sesiones en las que trabajamos con esos componentes.
Aquí tenéis el enlace a la sesión:
Seguiremos trabajando con este brazo robot, porque la verdad es que es divertido y puede ser útil para bastantes proyectos. Y lo siguiente que haremos con él probablemente sea controlarlo con el acelerómetro del mando de la Wii, de forma que el brazo imite los movimientos que hagamos con la mano.
Un saludo desde Prometec y hasta la próxima.

Comments are closed.