
Brazo robótico de dos ejes
Presentamos una nueva serie de tutoriales en los que trabajaremos con un brazo robótico de dos ejes. Esta primera sesión la vamos a dedicar a explicar cómo montar el brazo robot. De momento no vamos a entrar a explicar nada acerca de su programación o funcionamiento, sino que nos vamos a centrar en mostrar los más claro posible los pasos que hay que seguir para montar correctamente la estructura.
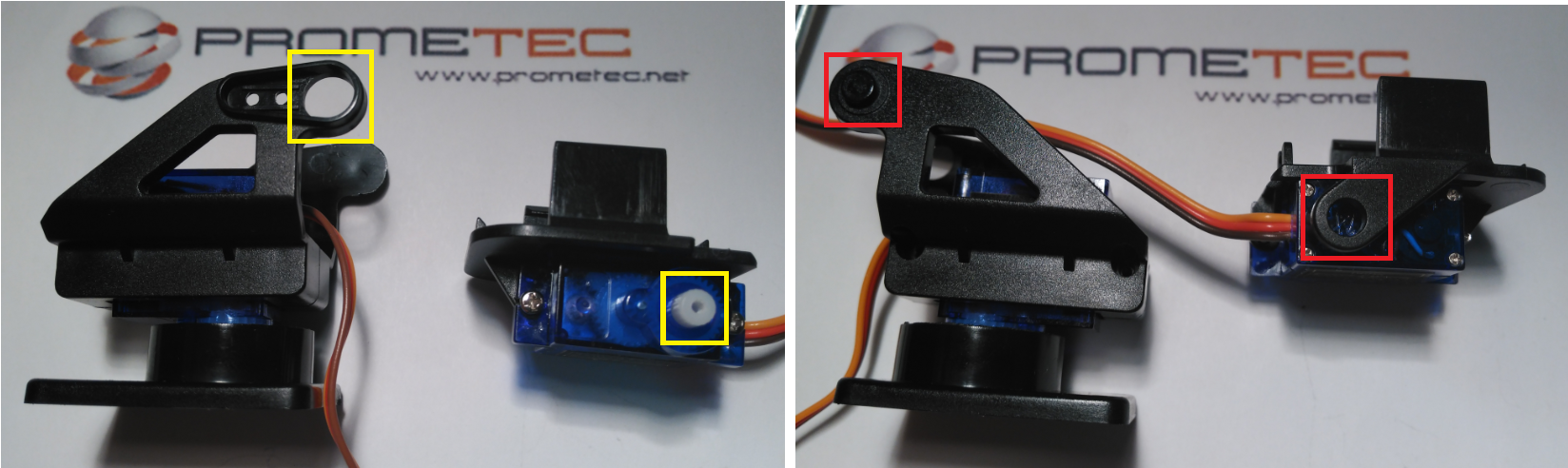
Para poder montar este mecanismo necesitaremos el kit de soporte de servos pan & tilt y dos servos SG 90 que se encargarán de mover las articulaciones del brazo. El kit del que hablamos es un pequeño conjunto de piezas de plástico que nos permite montar un par de servos SG90para conseguir movimiento de giro en dos ejes, y permite engancharle una pequeña cámara o algo similar.
Ya veréis cómo es un artilugio de lo más divertido y didáctico, y nos va a dar mucho juego. Trabajaremos con él tanto en S4A como en el IDE de Arduino, y trataremos de controlarlo de diferentes formas, incluyendo el Nunchuk de la Wii para controlarlo con el movimiento de nuestra mano, gracias al acelerómetro. También podríamos colocarlo en un coche tipo Rover, o ponerle un láser y tener un rato entretenida a nuestra mascota persiguiéndolo.
Aquí tenéis el enlace a la sesión:
Iremos publicando sesiones relacionadas con este brazo robótico para que podáis empezar a trabajar con él lo antes posible.
Un saludo desde Prometec y hasta la próxima.
