S4A: Brazo robótico y joystick
Ahora que ya hemos montado el brazo robot podemos empezar a trabajar con él. Y en este caso presentamos una sesión en la que aprenderemos a manejarlo con un joystick y programándolo con S4A.
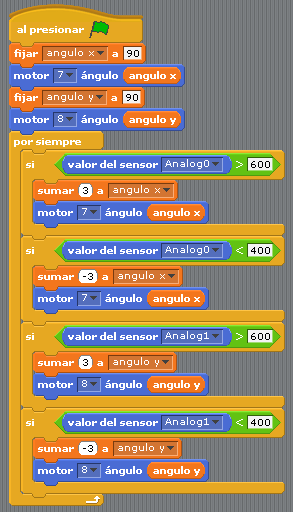
No vamos a ver nada nuevo, porque ya hemos utilizado tanto los servos como los joysticks anteriormente, pero en esta ocasión utilizaremos ambos ejes de movimiento del joystick para manejar dos servos de forma simultánea.

Ya veréis como es muy divertido de usar y se me ocurren muchas aplicaciones y proyectos en los que podemos usarlo (y seguro que a vosotros se os ocurren más aún).
Aquí os dejamos el enlace a la sesión:
Seguiremos trabajando con este brazo, aunque probablemente la siguiente sesión corresponda al IDE normal de Arduino.
Además, y aprovechando que ya sabemos usar el Bluetooth con S4A y ya podemos trabajar con proyectos inalámbricos, trataremos de construir y programar algún robot tipo coche teledirigido lo antes posible, al que podremos incorporar además este brazo robótico.
Un saludo desde Prometec y hasta la próxima.

Comments are closed.