Construcción y componentes de un cuadracóptero

Construcción de un cuadracóptero. Anatomía del hardware
En este post explicaremos la anatomía de un cuadracóptero, y que función tiene cada componente. Este tutorial es una parte esencial para aprender a construir un cuadracóptero desde cero.
Eligiendo el Hardware
Si piensas en construir un cuadracóptero pero no estás seguro por donde empezar con seguridad puedes encontrar esta guía muy útil.
Los mini quads son la plataforma más versátil para volar en FPV y pueden ser usadas para carreras, vuelo en estilo libre e incluso rodajes aéreos.
Este post estará dividido en tres secciones:
1 – Qué es un cuadracóptero
2- Cómo vuela un cuadracóptero
3 – Un repaso a cada uno de los componentes de un cuadracóptero
Para evitar que sea un tutorial imposiblemente largo, simplemente enumeraremos los componentes y como interactúan entre sí. Más adelante publicaremos tutoriales más exhaustivos de cada uno de estos elementos.
1 – Qué es un cuadracóptero
Un cuadracóptero es un aparato multirrotor con 4 motores, también conocido como dron o UAV (Unmanned Aerial Vehicle). Un cuadracóptero guarda cierta similaridad con un helicóptero en cuanto a la forma en la que vuelan, impulsando aire hacia abajo sin necesitar planos de sustentación (alas). Los cuadracópteros proporcionan una plataforma de vuelo relativamente estable, haciéndolos ideales para tareas como la vigilancia o la fotografía aérea
Los cuadracópteros existen en una variedad enorme de tamaños. Desde pequeños como la palma de tu mano hasta alguno suficientemente grande como para llevar a un piloto a bordo. La primera moto aérea real.


2 – Cómo vuela un cuadracóptero?
En un helicóptero normal, hay un gran rotor que proporciona toda la potencia de elevación y un pequeño rotor de cola para compensar el par generado por el giro del rotor principal. Sin este rotor de cola, la cabina del helicóptero giraría sin parar casi tan rápido como el rotor.
A diferencia de los helicópteros, un cuadracóptero tiene 4 rotores para producir el empuje ascendente, cada rotor aportando un cuarto de la fuerza, es decir, se pueden utilizar motores menos potentes y por tanto más baratos.
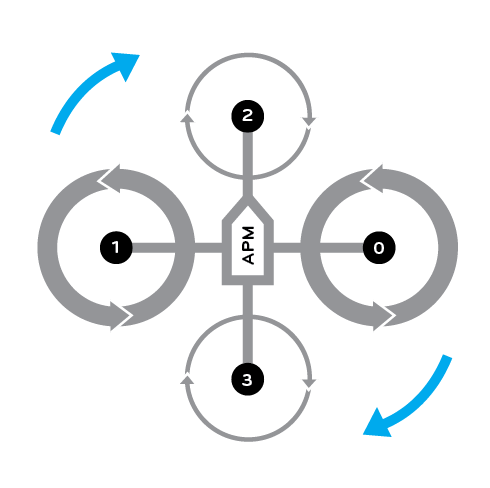
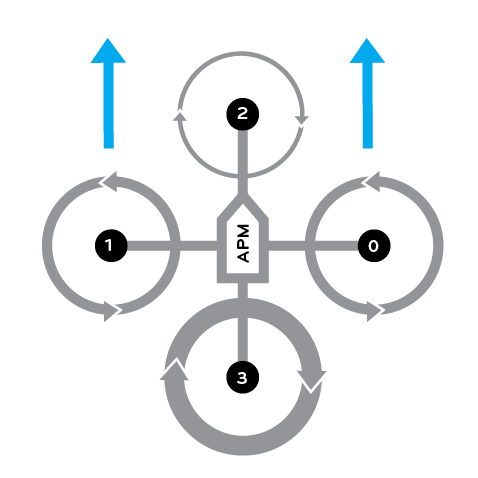
El movimiento en un cuadracóptero se controla variando el empuje relativo de cada rotor. Estos rotores se disponen normalmente en un cuadrado. Los dos situados en una de las diagonales giran en un sentido y los dos situados en la otra lo hacen en el contrario. Si todas las hélices girasen en el mismo sentido, al quad le pasaría lo mismo que al helicóptero sin rotor de cola, giraría continuamente.
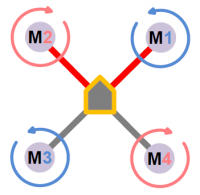
La guiñada (giro del aparato alrededor de un eje vertical) se puede inducir creando fuerzas aerodinámicas que no estén equilibradas entre los rotores, es decir, haciendo que los motores de una diagonal giren más rápido que los de la otra.
Para mantener el equilibrio, un cuadracóptero debe continuamente adquirir datos de sus sensores y realizar pequeños ajustes a la velocidad de rotación de sus rotores de modo que el cuerpo del aparato se mantenga nivelado. Un cuadracóptero tiene 4 grados de libertad: alabeo, cabeceo, guiñada y altura
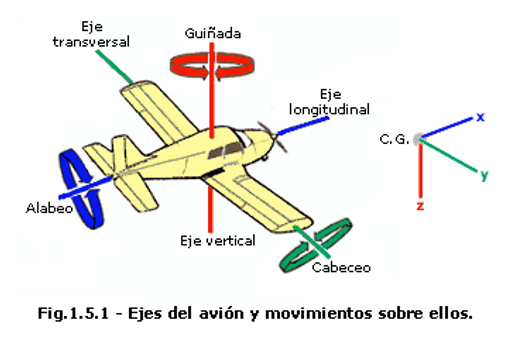
(alabeo – giro alrededor de un eje longitudinal, cabeceo – giro alrededor de un eje transversal, guiñada – giro alrededor de un eje vertical, altura – pues eso, altura a la que está el aparato. Qué esperabas?)
Cada grado de libertad puede ser controlado ajustando la velocidad de giro de cada uno de los cuatro rotores.
Ya hemos descrito como se produce la guiñada, acelerando los motores de una diagonal y desacelerando los de la otra. Si los motores se aceleran y desaceleran lo mismo, la altura del aparato no cambiará. Es fácil intuir cómo tienen que comportarse los motores para que se produzcan movimientos en los otros grados de libertad. Así, lógicamente para ganar altura los cuatro motores girarán más rápido.
Cuando se inclina el aparato respecto de la horizontal (alabeos o cabeceos), el empuje de los motores del aparato ya no es vertical, y esta aparición de una componente horizontal en el empuje provoca que el aparato se desplace en un plano horizontal, excepto que no lo hace así porque al inclinar el aparato también disminuye la componente vertical del empuje, lo que hace que el dron caiga un poco también. El piloto debe compensar acelerando para mantener el nivel y que el aparato sólo se desplace horizontalmente.
Esto ilustra como los ajustes hechos en cada grado de libertad deben hacerse conjuntamente para lograr en el dron el movimiento deseado, pero afortunadamente todo esto lo hace el controlador de vuelo FC (Flight Controller). Nosotros desde el suelo no tenemos que decirle a cada rotor cómo de rápido debe girar sino simplemente decirle al FC hacia donde queremos ir.
Los drones avanzados están equipados con GPS y hardware y software adicional que les permiten volar de forma autónoma.
3-Anatomía y componentes de un cuadracóptero
El primer paso para construir un cuadracóptero es entender qué es lo que lleva dentro, como están conectados estos componentes y cómo trabajan juntos,
Un cuadracóptero esta formado por los siguientes elementos:
El chasis o cuadro – es la estructura que mantiene unidos a todos los componentes, Deben estar diseñados para ser rígidos, ligeros y resistentes.
4 motores – Se utilizan motores de corriente continua, con o sin escobillas. Proporcionan el empuje necesario para elevar el aparato
4 Controladores electrónicos de velocidad ESC (Electronic Speed Controllers)
4 Hélices
Una batería
El controlador de vuelo FC (Flight Controller)
Un radio transmisor / receptor – RX / TX
Otros componentes opcionales (no esenciales)
El chasis

El chasis o cuadro es la estructura o esqueleto que mantiene unidos a todos los componentes del cuadracóptero.
Normalmente no es más que una placa plana en forma de X. Los chasis de cuadracópteros están normalmente hechos de fibra de carbono, aluminio, plástico o madera. Los cuadros deben ser resistentes para evitar dañarse en los choques y rígidos para minimizar las vibraciones.
Un cuadro básico de un cuadracóptero simplemente consta de las siguientes partes:
- La placa central donde se montan los componentes
- Cuatro brazos unidos a esta placa central (en ingles Boom, que se podría traducir como mástiles)
Los materiales más normales con los que están confeccionados los chasis suelen ser la fibra de carbono y el aluminio, aunque también los hay de madera contrachapada, de MDF o placas de fibras de madera, de plástico, confeccionados con impresoras 3D e incluso de titanio.
Los más populares son los de fibra de carbono debido a sus propiedades mecánicas (es muy resistente y rígida) y a su bajo peso.
Los tubos de aluminio cuadrados también son comunes para los brazos de un cuadracóptero por su precio, relativa ligereza y rigidez, pero pueden transmitir las vibraciones del motor, ya que su efecto amortiguador no es tan bueno como el de la fibra de carbono. En caso de un problema serio de vibraciones la lectura de los sensores se puede resentir.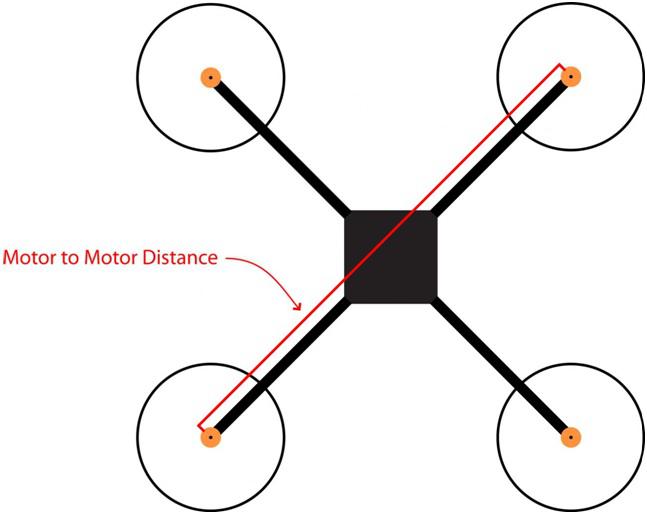
La madera contrachapada y las placas de MDF son mejores que el aluminio en lo relativo a la transmisión de vibraciones, pero no son materiales muy resistentes y se rompen fácilmente en los choques.
El tamaño de un cuadracóptero normalmente se refiere a la distancia de motor a motor, esto es la distancia entre los ejes de dos motores en una diagonal. La distancia de motor a motor afecta el tamaño de hélices que pueden ser usadas. Debes asegurarte que hay suficiente espacio entre las hélices y el resto del hardware como para que no haya interferencias entre ambos.
Para saber más de chasis para cuadracópteros mira este post.
Motores eléctricos
Los motores eléctricos hacen girar las hélices que generan el empuje. Hay dos tipos básicos de motores eléctricos para multirrotores: motores con escobillas y motores sin ellas. Los motores con escobillas se suelen montar principalmente en montajes pequeños y de poca potencia. Los motores sin escobillas en aparatos más grandes y potentes.
Motores con escobillas

Son básicamente motores de corriente continua. Los que se usan en los quads suelen ser generalmente más ligeros que los motores sin escobillas y son usados normalmente en montajes de poca potencia. Son muy baratos de reemplazar pero normalmente tienen un ciclo de vida corto.
Motores sin escobillas

Son similares al resto de motores de corriente continua en cuanto a la forma en la que las bobinas y los imanes son usados para impulsar el rotor. Los motores sin escobillas tienen tres (o un múltiplo de 3) bobinas unidas a la base y una serie de imanes permanentes montados en un cilindro que gira alrededor del eje del motor. Puesto que las bobinas no giran, no hay necesidad de escobillas.
Generalmente, los motores sin escobillas giran más rápido y consumen menos potencia que sus hermanos con ellas. Además, los motores sin escobillas no pierden potencia en la transición entre bobinas de las escobillas ni por el rozamiento de éstas, así que son más eficientes.
Los motores sin escobillas vienen en muchas variedades, con tamaño, potencia y consumo diferentes. Cuando elijas tus motores debes tener en cuenta el tamaño, el peso y el tipo de hélice que piensas instalar, de modo que todo se ajuste al consumo eléctrico esperado.
para saber más sobre motores para drones mira este post.
Hélices
Las hélices al girar proporcionan el empuje necesario para que el quad se eleve. Normalmente están hechas de plástico resistente. En ocasiones de fibra de carbono e incluso de madera.
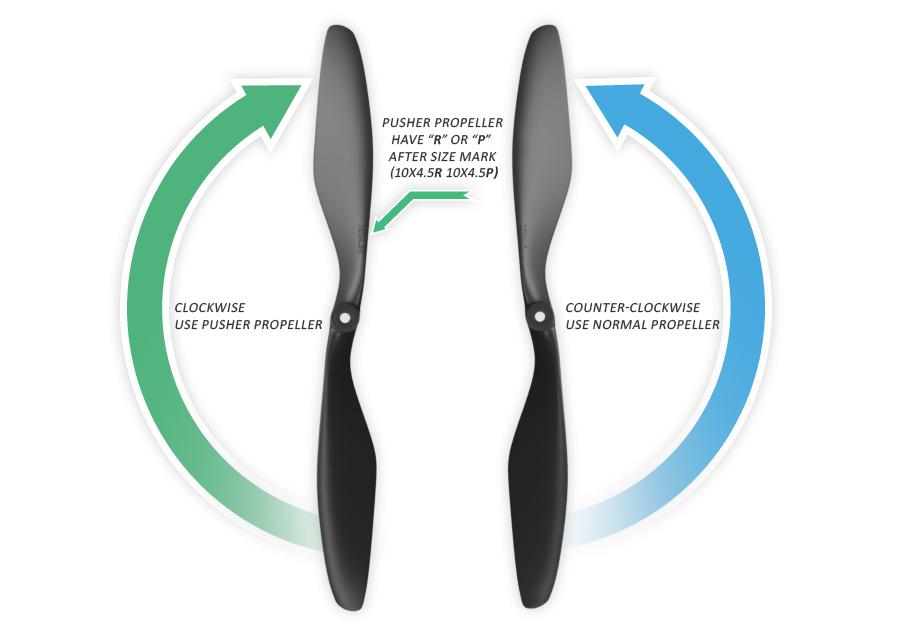
Probablemente te habrás fijado que las cuatro hélices de un quad no son iguales. 2 giran en un sentido y las otras dos en el contrario.
Las hélices vienen con distintos diámetros y ángulos de pala. Debes decidir cual usar de acuerdo al tamaño de tu chasis, y una vez has decidido, seleccionar tus motores de acuerdo a ellas.
Para saber más sobre hélices para drones mira este artículo.
Controles electrónicos de velocidad ESC – Electronic Speed Controller
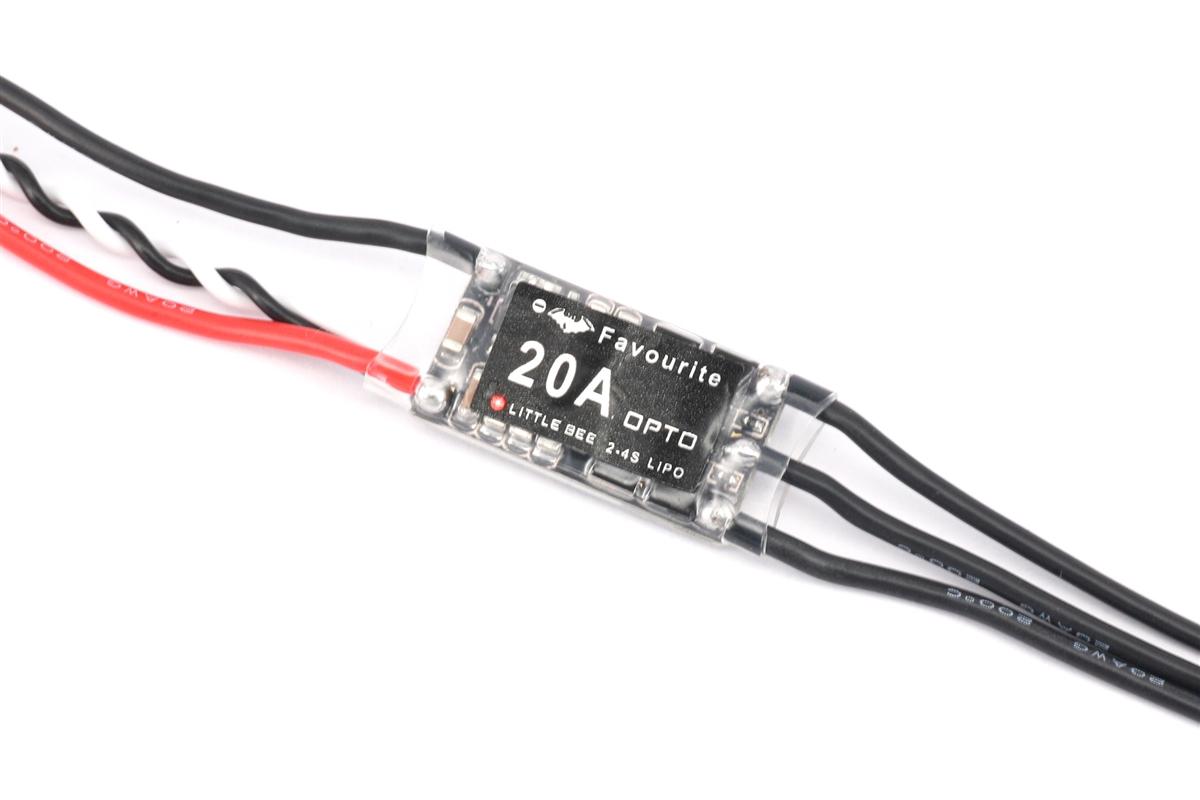
Los ESC son dispositivos que interpretan la señal del controlador y controlan la velocidad de giro de los motores sin escobillas. Los motores con escobillas no necesitan ESC porque pueden ser controlados simplemente con transistores que ya están en el controlador de vuelo FC. Cada uno de los motores necesita un ESC para trabajar.
Los motores sin escobillas poseen múltiples fases, normalmente son trifásicos, así que su alimentación directa con un voltaje no producirá el giro. El ESC genera tres señales de alta frecuencia con un desfase que induce que giro del motor.
Los ESC están conectados al controlador de vuelo FC y son controlados por una señal digital o PWM. Cuando selecciones un ESC, lo más importante es el amperaje que admite.
Para saber más sobre los ESC mira este post..
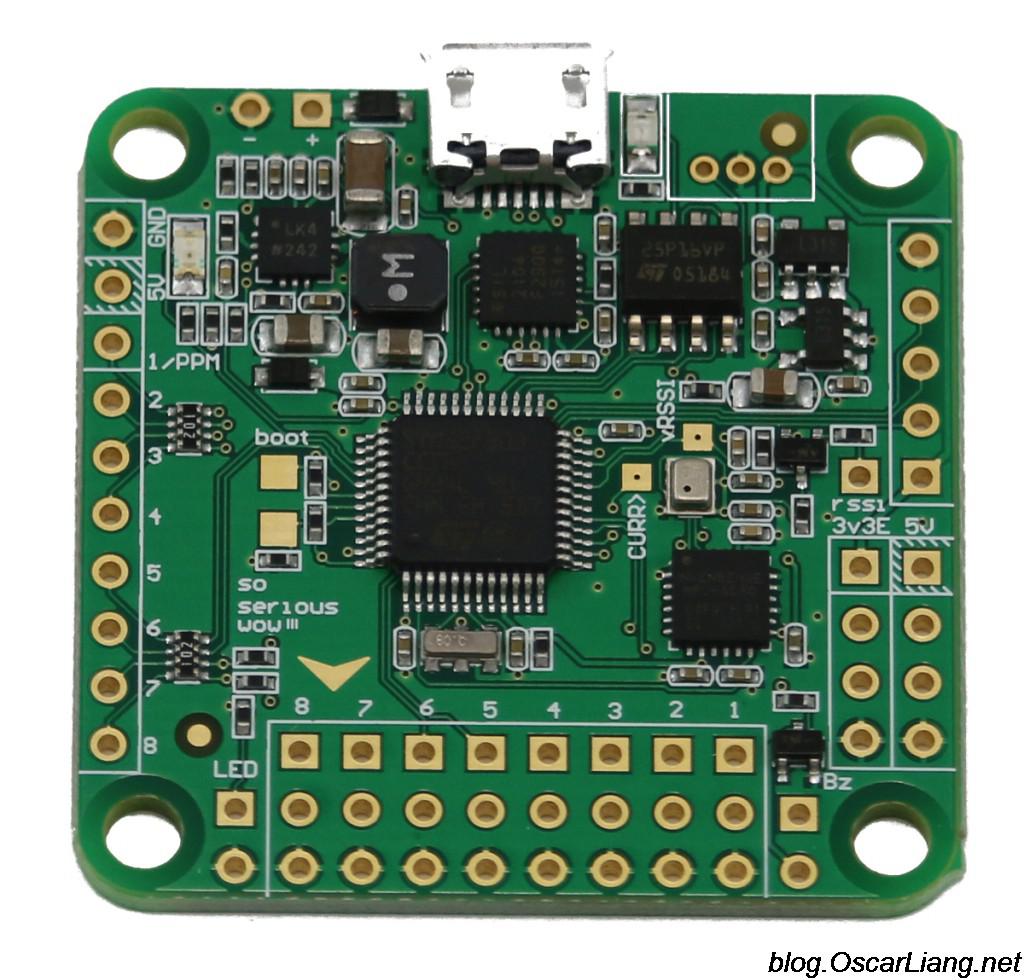
Controlador de vuelo FC

El FC es el cerebro del cuadracóptero. Un FC contiene al menos un microprocesador CPU y un sensor conocido como la unidad de medida inercial o IMU por sus siglas en inglés (Inertial Measurement Unit)
El IMU es un sensor electrónico que mide la velocidad, orientación y fuerzas gravitacionales que actúan sobre el cuadracóptero. Estas medidas permiten al FC calcular los cambios de velocidad que requieren los motores. El IMU normalmente contiene un giroscopio (Gyro) y un acelerómetro (Acc)
El acelerómetro mide la aceleración y también la fuerza, es decir que siente la atracción de la gravedad. Puesto que trabaja en tres ejes, con la ayuda de este sensor el FC puede calcular la orientación del aparato.
El giroscopio mide la velocidad angular, En otras palabras, detecta la velocidad de rotación en los tres ejes.
Si te gustan los desafíos, puedes intentar construir un FC usando un Arduino.
Para saber más sobre los FC puedes mirar este post.
Receptor de radio RX

El cuadracóptero es normalmente controlado con un radiotransmisor TX. El radio receptor RX recoge las señales y las traslada al FC para que éste actúe en consecuencia.
Transmisores y receptores generalmente sólo pueden ser emparejados si son de la misma marca. 2.4 GHz es la frecuencia más popular para equipos de radio control. Es la misma banda en la que opera tu wifi, tu microondas y tu bluetooth. Múltiples sistemas de radio control a 2,4 GHz pueden operar simultáneamente sin problemas.
Para saber más sobre equipos Radiotransmisores y Radioreceptores mira este post:
Batería

Las baterías LiPo son la fuente de poder para los cuadracópteros. Estas baterías son usadas por su alta densidad energética y su elevada capacidad de descarga.
Las baterías LiPo se caracterizan por su voltaje nominal de salida, su número de celdas y su velocidad de descarga.
Para saber más sobre las LiPo mira este artículo.
Distribución de potencia
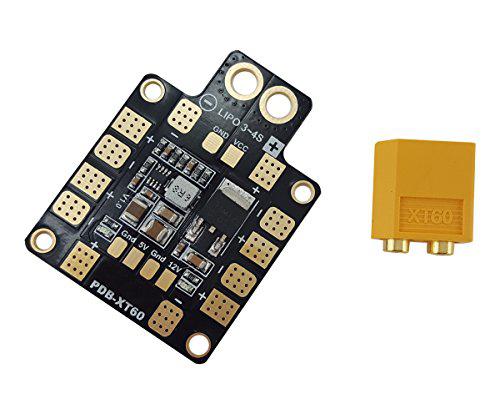
La distribución de potencia puede tomar la forma de una placa (PDB – Power Distribution Board) o de un arnés de cables.
La distribución de potencia contiene los conectores que se enchufan directamente a la batería LiPo y es responsable de llevar la corriente a los ESC y a los motores, además de proporcionar la energía al voltaje correcto para que trabajen el resto de los componentes..
Cámara FPV

La cámara FPV permite al piloto que lleva las gafas ver lo que el cuadracóptero esta viendo durante el vuelo. En un quad FPV normalmente se pueden encontrar dos cámaras, una que trabaja a tiempo real emitiendo una señal de vídeo y otra para grabar en HD.
Las cámaras FPV puede que no tengan la mejor calidad, pero están diseñadas para tener baja latencia y un rango dinámico amplio, es decir, son capaces de trabajar en una amplia variedad de condiciones de luz lo cual es muy importante para un FPV.
Para conocer más sobre las LiPo mira en este post..
Transmisor de Vídeo

El transmisor de vídeo o VTX está conectado a la cámara FPV y transmite la señal directamente A las gafas FPV o a un monitor cercano al piloto. La mayoría de los drones utilizan la banda de 5.8 GHz para las transmisiones de vídeo.
Para saber más sobre los VTX puedes ver este articulo..
Antena FPV

Todo transmisor VTX requiere de una antena para transmitir la señal.
Para conocer más sobre las cámaras FPV mira este artículo..
Componentes opcionales
Otros componentes opcionales son los módulos de geolocalización GPS, los sensores ultrasónicos, los barómetros, los módulos OSD (On Screen Display), las cámaras HD, etc. Pueden mejorar el comportamiento de un cuadracóptero e incluir mas funciones. En cualquier caso debes asegurarte que to controlador de vuelo FP pueda soportar este hardware adicional.
Un módulo GPS recibe datos de los satélites para computar información sobre su localización. Estos datos se pueden utilizar para calcular rumbo y velocidad. El GPS es esencial para los vuelos autónomos de larga distancia.
Un sensor ultrasónico mide la distancia entre el aparato y el suelo, por ejemplo esto es útil si queremos por ejemplo que el aparato mantenga cierta distancia del suelo de modo automático.
Los sensores ultrasónicos tienes un límite de altura operativa, así que si quieres medir alturas mayores quizás debas considerar incorporar un barómetro. Este sensor mide la presión y la humedad del ambiente para calcular la altitud, así que cuando el aparato está próximo al suelo es completamente inefectivo puesto que estos datos apenas cambian. Lo normal es combinar el trabajo del barómetro con el del detector de ultrasonidos para obtener el mejor resultado.
El módulo OSD introduce datos en el canal de vídeo para facilitar el manejo del dron.
Las cámaras HD proporcionan metraje de calidad, ya que el proporcionado por las cámaras HD en analógico y de poca resolución.
Esperamos que esta guía te haya dado un mejor entendimiento de los componentes de un cuadracóptero, para qué sirven y cómo trabajan.
Pronto prepararemos un pequeño tutorial donde puedas ver cómo son estas piezas unas junto a las otras y dónde se sitúan en un cuadracóptero.
Para aprender a volar un cuadracóptero también tendremos un tutorial de vuelo para principiantes.