Distintas configuraciones para los multirrotores

El aparato comúnmente conocido como helicóptero tiene un solo rotor, mientras que los multicópteros son aparatos con dos o más rotores. En este post te vamos a presentar los tipos más normales de multirrotores y analizaremos los pros y contras de cada configuración.
Los multirrotores o multicópteros suelen utilizar hélices con palas de ángulo fijo, es decir que el control del vehículo se obtiene variando la velocidad relativa de cada rotor.
Hay muchos tipos de multirrotor, y normalmente son categorizados por el número de rotores que poseen y la disposición de estos en la estructura del vehículo, así tenemos:
- Bicópteros
- Tricópteros (Y3, T3)
- Cuadracópteros (X4, H4, Y4, Cola en V, Cola en A)
- Pentacópteros
- Hexacópteros (Y6)
- Octocópteros (X8)
El número de rotores y la disposición de éstos tienen su efecto en la forma de vuelo y cada una de las composiciones tiene su propia ventaja. Por ejemplo, cuantos más rotores tienes, más potencia y capacidad de levantamiento, lo que significa que puedes llevar más carga útil. Más motores implica también más redundancia en caso de que uno de ellos falle, pero al mismo tiempo desciende la eficiencia de la potencia utilizada y aumenta el coste del aparato.
Bicópteros


Los bicópteros tienen dos rotores cuyo ángulo de inclinación puede ser alterado mediante dos servos. Exactamente igual que los “helicópteros” armados de la película Avatar.
Con solamente dos motores y dos servos los bicópteros podrían ser la configuración más barata, pero también es la plataforma más difícil para estabilizar en vuelo además de ser la que posee menos capacidad de carga. Lo cierto es que, por bonito que sea el helicóptero de avatar o el MV22 Osprey del ejercito americano, que también es otro multirrotor pero dotado con planos de sustentación (alas), los bicópteros no son populares entre los aficionados a este hobby y no se encuentra mucha información al respecto en internet.
Tricópteros
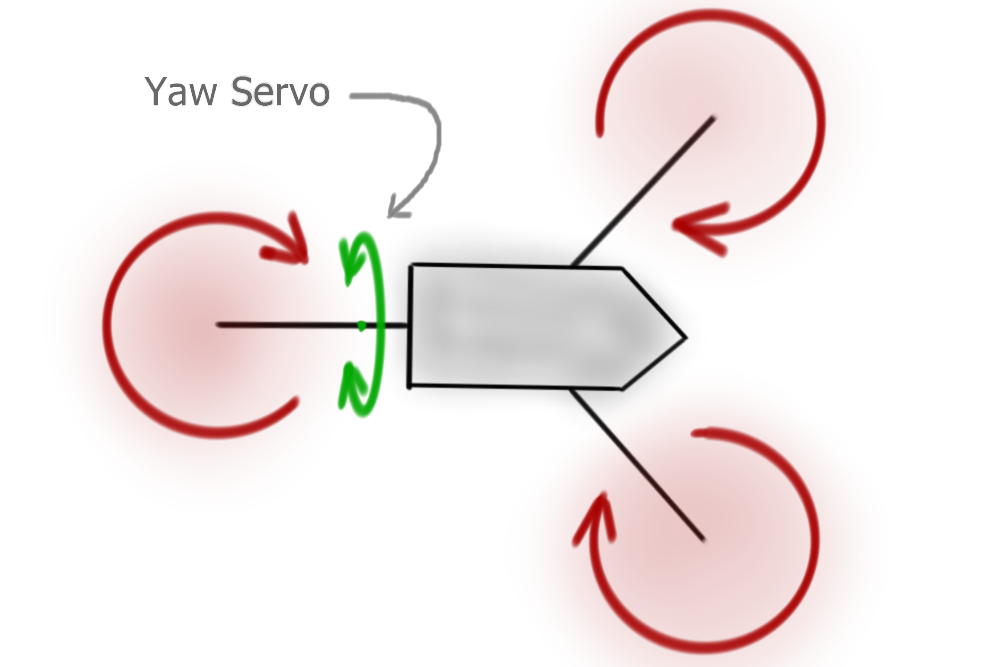

Los tricópteros tienen tres rotores, y típicamente una forma de Y, con los brazos a menudo situados a 120º. También pueden tener forma de T.
Las dos hélices de los brazos anteriores tiran del aparato girando en sentido contrario y la hélice de la cola ayuda a la orientación inclinándose a un lado y otro con un servo. Es una configuración popular porque sólo necesita tres motores y un servo, que son más baratos que los motores.
Generalizando, se puede decir que los tricópteros son menos estables que otros multirrotores con más motores y que además no son tan robustos debido fundamentalmente a la vulnerabilidad frente a los choques que supone la presencia del servo y el mecanismo de orientación de la hélice trasera. También son más difíciles de construir por este mismo motivo.
Los tricópteros tienen más capacidad de alabeo (giro alrededor del eje longitudinal del aparato) que otros multirrotores, esto es debido a que los multirrotores alabean elevando la potencia (la velocidad de giro) de los dos motores a un lado del eje y disminuyendo la potencia de los otros dos motores. Si los motores están girando ya a tope, sólo puede disminuir la potencia de uno de los lados. Los tricópteros tienen la ventaja de poder inclinar el rotor trasero perdiendo así menos sustentación.
En cualquier caso, como tienen menos motores, tienen menos capacidad de carga que los cuadracópteros.
Cuadracópteros
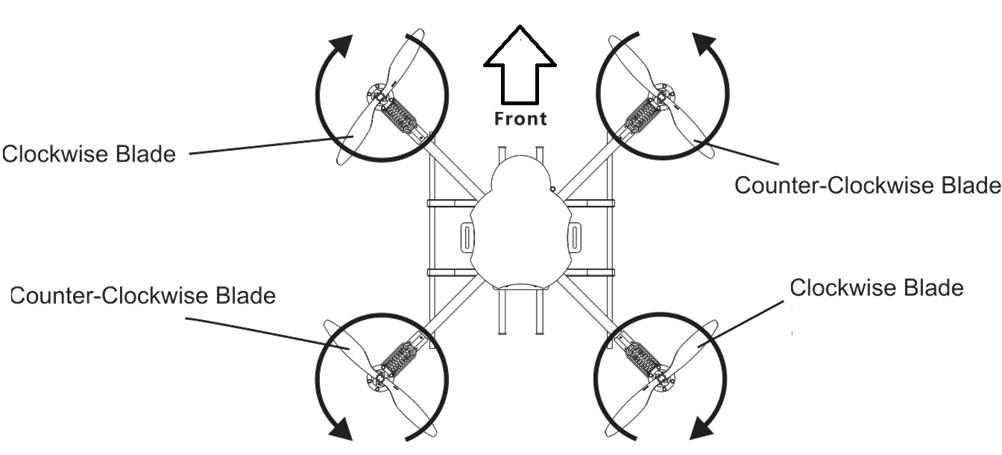

Un cuadracóptero tiene cuatro motores montados en un chasis simétrico, típicamente en una configuración en X a 90º. Dos de los motores giran en un sentido y los otros dos en sentido contrario para generar fuerzas dinámicas contrarias y que el aparato se mantenga en equilibrio. Los cuadracópteros tienen la estructura mecánica más sencilla y son la configuración de multirrotor más popular. Es la más ampliamente usada en las carreras de mini quads.
Hay dos configuraciones de vuelo distintas: X ó +
La configuración en X es más popular porque puedes dejar las hélices fuera del campo de visión de la cámara FPV, pero alguna gente prefiere volar la configuración en + porque la sienten más intuitiva y si vuela como un avión es más fácil hacerse a la idea de la orientación.
También se puede encontrar la configuración en H que permite colocar la cámara bien delante en el chasis evitando la visión de las hélices en la cámara FPV. Siempre existe el debate de cual de las configuraciones es mejor.
Configuración Y4.
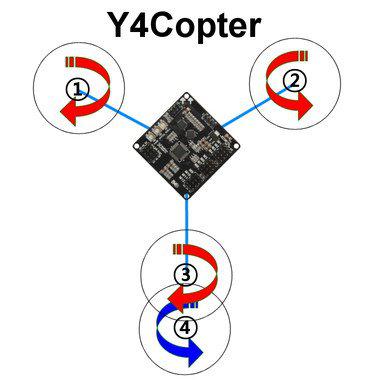
Parece un tricóptero pero sin el servo trasero. En lugar de ello hay dos hélices coaxiales girando en sentido contrario en la parte trasera. Mecánicamente es más simple que los tricópteros por la ausencia de mecanismos y además con un peso muy similar tienen un tercio más de potencia. Son más confiables que los tricópteros simplemente por la ausencia de un servo.
Cola en V y Cola en A


Las colas en V y las colas en A son básicamente cuadracópteros con los motores delanteros normalmente situados mientras que los traseros están colocados más próximos con sus ejes inclinados respecto de la vertical, bien hacia afuera (cola en V) o bien hacia adentro (cola en A). Son una mezcla entre un cuadracóptero y un tricóptero y son muy parecidos a la configuración Y4.
No es una configuración popular porque proporciona poca eficacia a la potencia debido a la interferencia de los flujos de aire de las dos hélices traseras, pero la verdad es que son diseños bonitos y proporcionan una mejor visibilidad de la orientación.
Pentacópteros

Con 5 rotores. No hay mucha información al respecto porque no es una configuración popular. Una ventaja evidente es que situando los dos brazos delanteros a ambos lados de la cámara FPV, la visión es óptima.
Hexacópteros
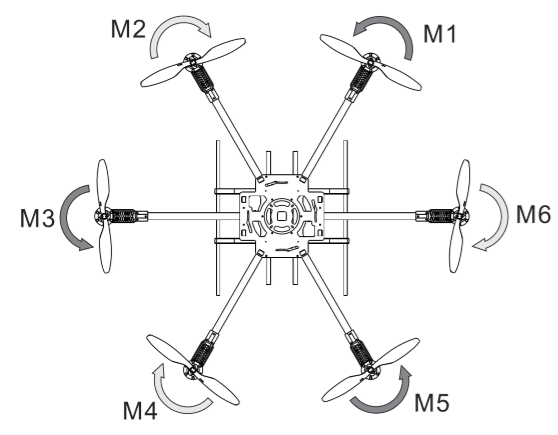

Con seis rotores. Típicamente en brazos montados a 60º en un chasis simétrico con tres de los motores girando en sentido horario y los otros tres en sentido antihorario.
Son muy parecidos a los cuadracópteros pero proporcionan mayor capacidad de carga gracias a los motores extra. También tienen una ventaja debido a esta redundancia, y es que en caso de fallo de uno de los motores, pueden a menudo aterrizar evitando daños a valiosas cámaras de vídeo o fotografía.
Su desventaja es que tienden a ser más grandes, caros y complicados de construir.
Configuración en Y6
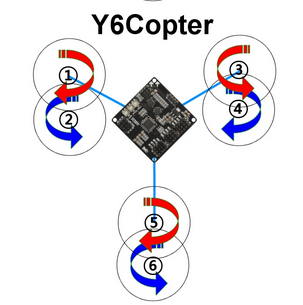

Tienen 6 motores pero situados en un chasis en Y con dos motores en cada brazo uno encima del otro girando en sentido contrario Similar a un tricóptero pero sin necesidad de un servo.
Este tipo de multicóptero puede ser construido de una forma muy compacta y con una capacidad de carga similar a la de un hexacóptero, sin embargo esta configuración no es muy eficiente debido a la disposición coaxial del los motores.
Octocópteros

Ocho motores. Un octocóptero típico tiene ocho motores al mismo nivel, cuatro de ellos girando en un sentido y los otros cuatro en el otro.
Se puede decir que son una versión mejorada de los hexacópteros, con más capacidad de carga y mayor redundancia. Son los drones más utilizados para fotografía aérea profesional debido a que pueden cargar pesado equipo de filmación.
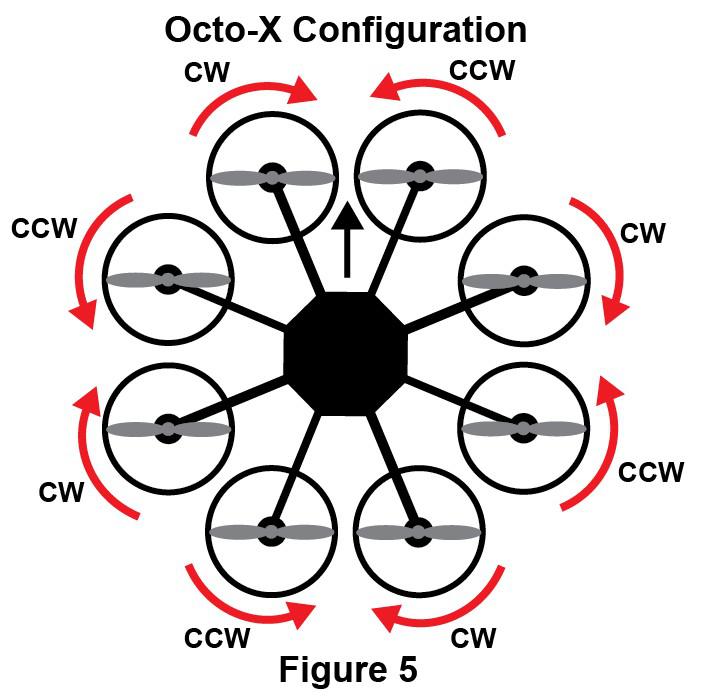
Configuración en X8
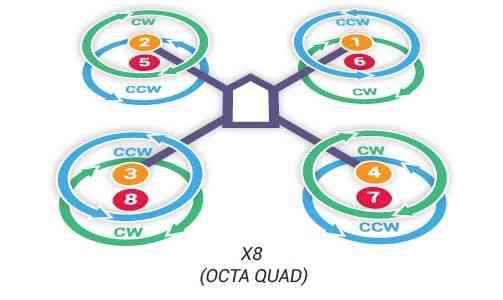

Los ocho motores están montados en cuatro brazos, dos en cada brazo con los ejes coaxiales y girando en sentido contrario. Similar a la configuración Y6.
Cómo elegir cual es la configuración más adecuada?
Como todo, depende de qué es lo que quieres hacer con el dron. Para hacer carreras lo que se utiliza son cuadracópteros o tricópteros. Si chocas hay menos hélices que cambiar y esto no es raro cuando estás volando rápido en proximidad a otros aparatos.
Para la fotografía aérea probablemente sea suficiente con un cuadracóptero si te vas a arreglar con una cámara Go-Pro, pero si quieres cargar equipo más pesado como una buena cámara con su mecanismo orientador de la misma (gimbal) necesitas una plataforma con más capacidad de carga y más fiabilidad como un hexacóptero o un octocóptero.
Disposición coaxial de los motores

En las configuraciones Y4, Y6 y X8 nos encontramos con una disposición coaxial de los motores. Esto tiene pros y contras.
Ventajas
- Cuando hay más de 5 motores presentes proporciona redundancia. El aparato es capaz de aterrizar con seguridad incluso en el caso de que falle uno de los motores.
- Ahorra espacio
- Proporciona la posibilidad de hacer el chasis plegable para una mejor movilidad
Desventajas
- Hay una perdida de eficiencia de un 10 a un 20% al acelerar los motores inferiores debido a que el aire ya les viene acelerado.
- Debido a que hay hélices situadas bajo el chasis, fuera del campo de visión, es más fácil acabar golpeando con ellas contra algún obstáculo.
- Es difícil encontrar o diseñar un tren de aterrizaje adecuado.