Cómo configurar el firmware Betaflight por primera vez

Así que ya tienes casi montado tu primer dron. Hiciste todas las soldaduras ayer en un par de horas, y la verdad es que te costó bastante menos que lo que habías pensado para el miedo que le tenías a ese trabajo.
Y ahora por fin ha llegado el momento de enfrentarte con el software. Llevas días mirando ese puerto USB que hay en el FC y te preguntas qué vas a poder hacer con él.
En este tutorial te lo vamos a explicar. Paso por paso. No va a ser éste un manual exhaustivo sobre Betaflight, porque sería imposiblemente largo para un solo post, pero sí que te vas a poder enterar perfectamente de lo que es Betaflight, y vas a poder aprender lo suficiente para configurarlo y echar a volar ese primer dron que acabas de construir.
El software de vuelo funciona francamente bien y es muy confiable. Es rarísimo que el programa se cuelgue, lo cual es una suerte porque eso de apagar y volver a encender no lo vas a poder hacer si tu dron está en el aire…
En este tutorial mostraremos cómo configurar el firmware de Betaflight pasando por cada una de las pestañas del configurador.
Sabemos que hay infinidad de vídeo tutoriales de Betaflight en Youtube, y esta guía no es más que otra aportación en la que presentaremos toda la información relativa a la configuración inicial de un aparato de forma secuencial y ordenada para evitarte la molestia de andar parando y echando para atrás un vídeo cuando configures tu aparato por primera vez.
Betaflight es un excelente firmware de código abierto para controladores de vuelo, y ha sido diseñado específicamente para mini quads de carreras.
Mira este repaso al firmware para FC para tener una visión más amplia.
Te enseñaremos en unos pasos simples cómo configurar tu cuadracóptero, lo justo para que puedas empezar a volar.
Antes de seguir, descarga el configurador de Betaflight en tu computadora. Te resultará mucho más fácil si tienes Google Chrome instalado. Betaflight se baja y se ejecuta como una aplicación de Chrome. Es probable que tengas que descargarte algunos drivers para manejar el puerto serie. Todos ellos los tienes indicados y localizados en la pantalla inicial de Betaflight.
Un consejo básico para aprender a manejar bien el configurador es ENREDA. En este tutorial describiremos algunas opciones en las pantallas. No tengas miedo de mirarlo todo y cambiar cosas para probar. Todos los cambios son reversibles y en último caso, siempre podrías cargar de nuevo el firmware con el bootloader.
Para mantener esta guía lo más sencilla posible, vamos a asumir que estamos configurando un hardware bastante estándar y que además vuela maravillosamente:
- RX Frsky, SBUS y telemetría SmartPort
- Controlador de vuelo F3 ó F4 corriendo firmware Betaflight 3.2 o posterior.
- ESCs capaces de correr el protocolo DShot
Si Betaflight no estuviera cargado o si quisieras cargar una versión más moderna
Si Betaflight no estuviera cargado, o si quisieras cargar una versión más moderna del firmware, deberías entrar en el modo Bootloader del control de vuelo. Ello normalmente se consigue pulsando un botón en el FC al conectarlo, o aveces puenteando dos pines al darle corriente y otras veces simplemente conectándolo al PC con la batería ya conectada.
En el momento en el que accedas al bootloader aparecerá DFU en la indicación del puerto en la esquina superior derecha de la pantalla.
No tienes ahora más que seleccionar el firmware adecuado a la tarjeta, elegir una versión, descargarlo de la red y flashearlo en el FC. Si no te sale bien a la primera, no te inquietes. Por algún motivo esto suele ocurrir a menudo.
Pasos a seguir para configurar Betaflight por primera vez
- Pestaña de configuración
- Puertos
- Configuración
- Receptor
- Modos
- Motores
- OSD
- Ajuste de los PID
Vamos a configurar los ajustes básicos de Betaflight para tu primer vuelo.
IMPORTANTE! Asegúrate que has retirado todas las hélices de tu quad para evitar accidentes.
Voy a ponerlo otra vez en mayúsculas y negrita para que quede bien claro: POR MOTIVOS DE SEGURIDAD ES IMPORTANTE QUE RETIRES TODAS LAS HÉLICES DEL APARATO.
Pestaña de Ajustes (Setup)
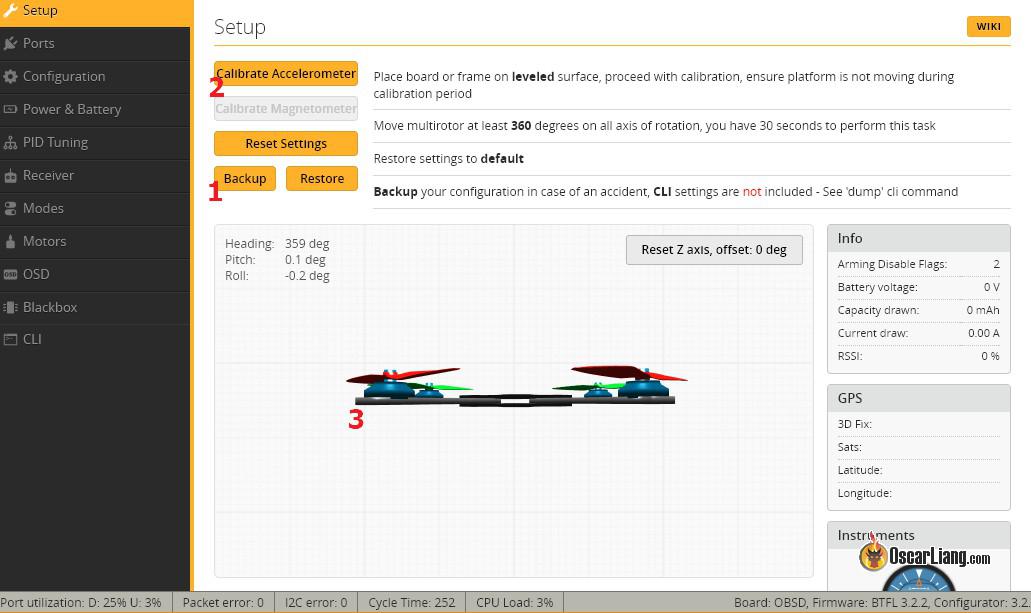
- Haz un backup de los ajustes
- Pon el dron en una superficie horizontal y calibra en acelerómetro ACC
- Ahora mueve el quad con la mano y asegúrate que el modelo 3D de la pantalla sigue los mismos movimientos.
Si el modelo 3D no se mueve igual que tu quad, probablemente significa que tu FC está instalado en una posición errónea (la flecha del FC no está en la cara superior del FC y apuntando hacia delante).
Puedes bien rotar el FC hasta que esté bien o puedes ajustar un offset (o varios en distintos ejes) en la pestaña del configurador, «Alineación de los sensores» o Board and sensor alignment, para arreglarlo (normalmente es 90 / 180 / 270 grados)
Pestaña de Puertos (Ports)
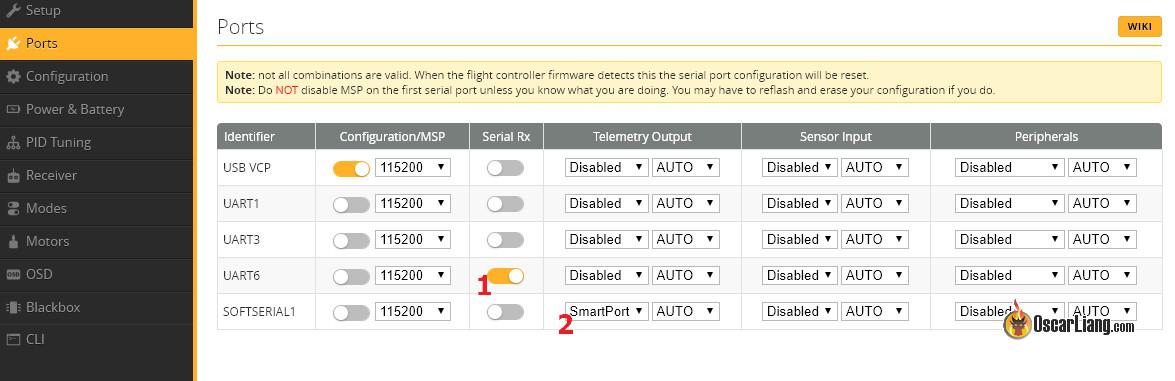
Si estás usando un receptor con SBUS o IBUS, necesitas habilitas “Serial RX” en el UART en el que el RX está conectado.
Si estás usando SmartPort, selecciona SmartPort en la salida de telemetría. Puedes dejarlo también por omisión en auto.
Pestaña de Configuración (Configuration)
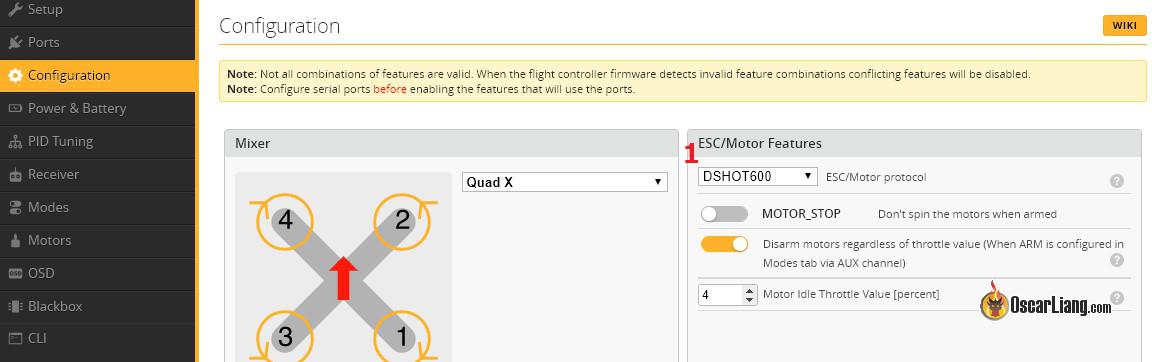
1.- Funciones de los motores / ESCs (ESC / Motor Features)
ESC/Motor Protocol -. Chequea las especificaciones de los ESCs para ver que protocolos soportan. Se recomienda DShot. Hablando en general, los ESCs con BLHeli_S pueden correr con DShot300 ó DShot600, mientras que los ESCs con BLHeli_32 pueden correr DShot 1200.
Recomendamos que mantengas siempre la opción MOTOR STOP desactivada, es decir, en cuanto armes el quad las hélices se pondrán a girar, de otro modo no podrás decir si tu quad está armado. Para el resto puedes dejar los valores por defecto.
Si estás configurando un dron con motores de escobillas como un Tiny whoop tendrías que elegir la opción «brushed».
2.- Configuración del sistema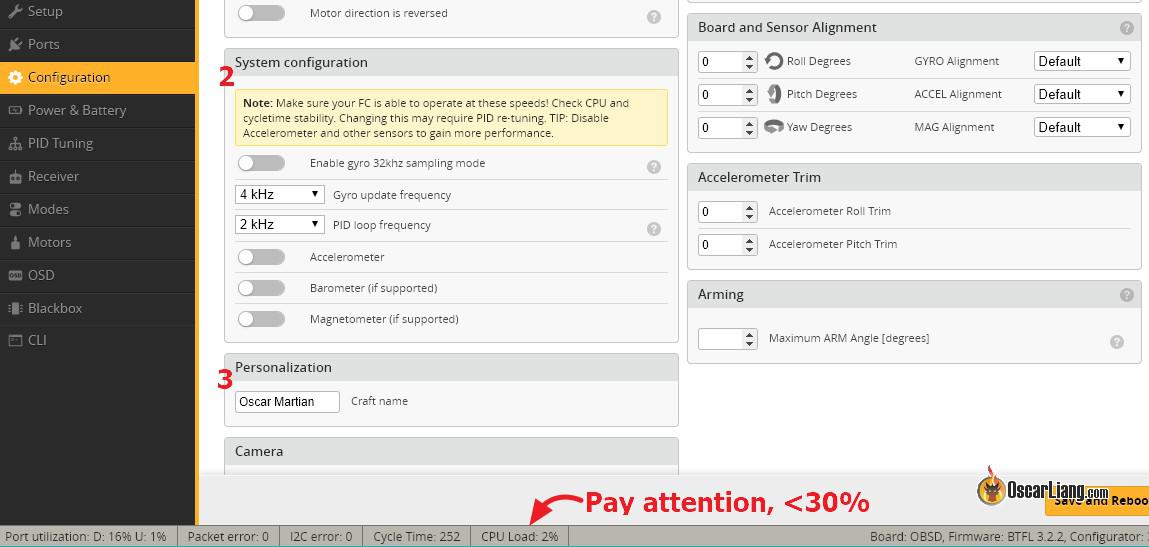
- Tiempo de ciclo (Looptime)
Depende de lo que tu FC es capaz de hacer. Lo adecuado suele ser usar un tiempo de ciclo más bajo (p.e. 2 KHz) para las construcciones ruidosas y un tiempo de ciclo más elevado (8 KHz) para las construcciones de mayor calidad. En cualquier caso, 2KHz debería funcionar bien con cualquier quad que haya por ahí.
- Velocidad de muestreo del giroscopio (Gyro Sampling Rate)
Normalmente debería ser igual que al tiempo de ciclo. Algunos prefieren doblar la frecuencia del tiempo de giro. Si no estás seguro, puedes ajustarlo a 4 KHz y el tiempo de ciclo a 2 KHz.
Experimenta y mira cual es el tiempo de ciclo que te funciona mejor. No hay una regla escrita en cuanto a qué es lo que deberías usar.
Cuando cambies estos valores, debes estar atento a cómo se modifica la carga de la CPU (CPU load). Se puede encontrar este dato en la parte inferior de la pantalla. Deberías mantener la carga de la CPU por debajo del 30%. Si fuera más alta, podría causar inestabilidad en el FC.
- Acelerómetro, Barómetro y Magnetómetro
Puedes desactivarlos para liberar algo de poder de procesamiento, pero no serás capaz de usar los modos ángulo u horizonte, y el modelo 3D del quad en la pantalla dejará de moverse. Otro motivo para deshabilitarlo, es que quieres evitar problemas armando el quad cuando está demasiado inclinado.
Desactiva el barómetro y el magnetómetro si estás configurando un dron de carreras.
3.- Personalización
Nombre del aparato (Craft name)
Se mostrará en el OSD de Betaflight para que cuando estés machacándoles a todos en la carrera. todo el mundo pueda ver que se trata de ti. No lo actives si eres muy torpe para evitar hacer el ridículo.
4.- Receptor (Receiver)
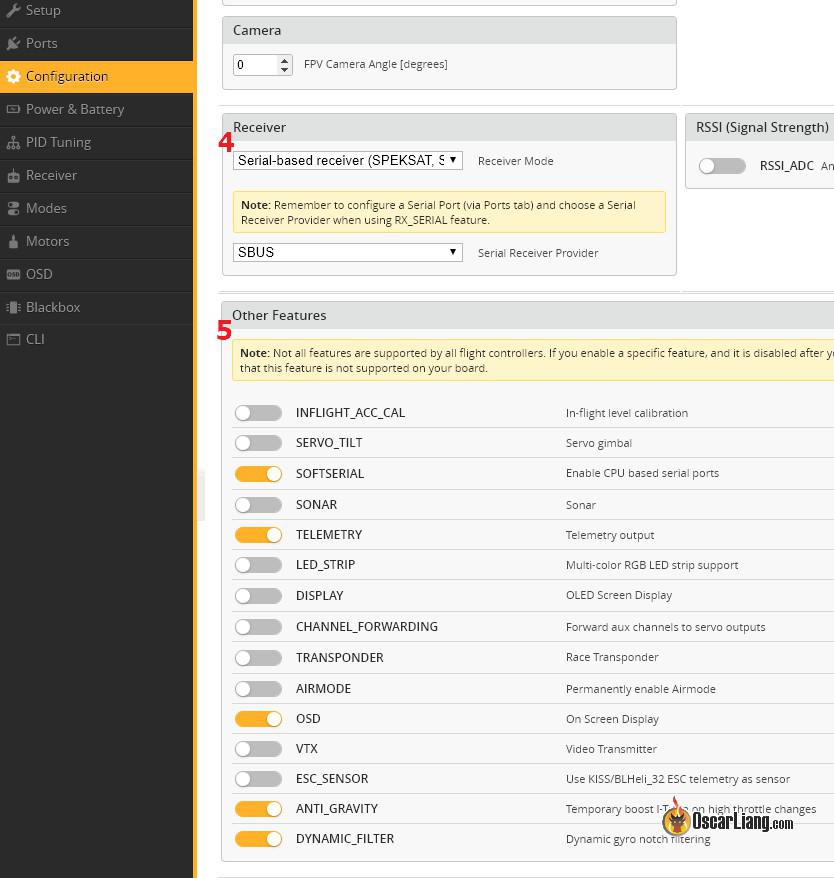
Si estás usando SBUS, IBUS o Spektrum Satellite RX, elige “Serial-base receiver” en el modo del receptor (Receiver mode). En “Serial receiver provider” elige SBUS si estás usando un RX Frsky. Si tu conexión es PPM, pon “PPM RX input” en el modo del receptor.
5.- Otras Funciones
Hay otras funciones que se suelen habilitar en Betaflight. Si no estás seguro, puedes dejarlas en los valores por omisión, y podrás volar sin problemas.
- Anti gravedad
- Filtro dinámico
- Telemetría (para el SmartPort)
- OSD si es que tu FC lo tiene integrado
6.- Por último haz clic en guardar y reiniciar (Save & Reboot) o todos los cambios que has hecho se perderán
Pestaña del Receptor (Receiver)
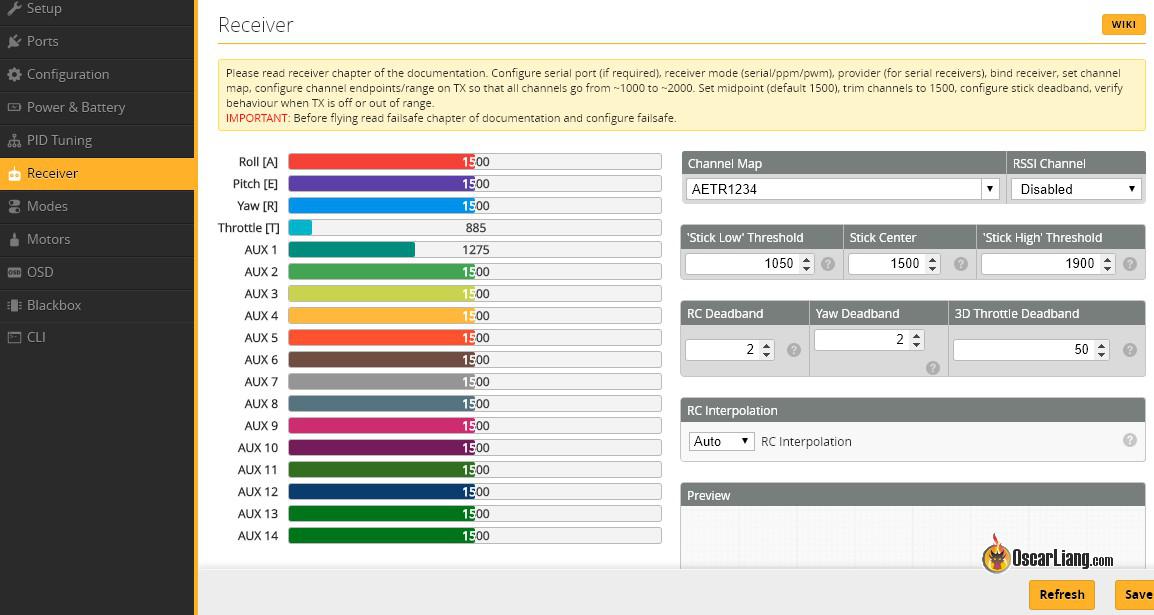
En esta pestaña puedes ver si tu receptor funciona correctamente. El receptor como muchos otros dispositivos, es posible que no funcionen si la batería no está conectada en el dron.
Da potencia a tu TX y a tu RX, y mueve los mandos uno por uno para ver si los canales correspondientes se mueven. Podría ser necesario cambiar el mapa de canales (Channel Map) si es que están en orden equivocado.En Betaflight simplemente cambia las letras de orden. En un Taranis también se puede hacer la reasignación de canales desde el mismo mando con las páginas INPUTS y MIXER.
Si ninguno de los canales responde, comprueba lo siguiente:
- Están el TX y el RX enlazados?
- Está el RX conectado correctamente al FC? Comprueba soldaduras y conectores
- Has habilitado el Serial RX en el UART correcto?
- Has seleccionado el protocolo RX correcto?
Una vez hayas comprobado que todos los canales funcionan correctamente, ahora puedes revisar los valores medios y máximos (con los mandos a la mitad y al final) de los primeros cuatro canales, que se corresponden al cabeceo, alabeo, guiñada y acelerador (pitch, roll, yaw & throttle). Estos canales deberían tener valores medios de 1500 y valores extremos de 1000 y 2000. Si no obtienes estos valores puedes buscar un tutorial de cómo arreglar los valores de entrada de los mandos. En un mando FRSky Taranis, esto se hace de forma sencilla con la página OUTPUTS .
Pestaña de Modos (Modes)
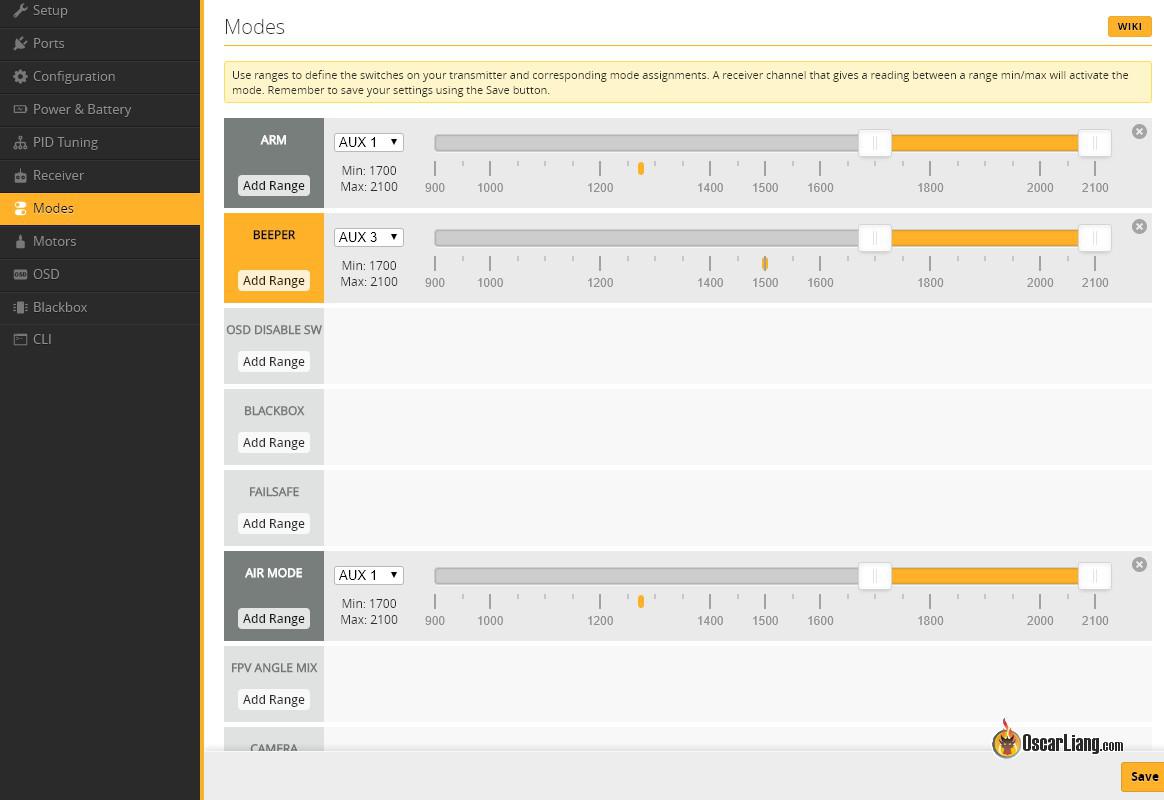
La pestaña de modos se amplía casi con cada nueva versión de Betaflight, añadiendo nuevas funciones, características y posibilidades.
Algunos de estos modos requerirían su propio tutorial, por lo que no entraremos a describir en detalle cada uno de ellos ahora. Puesto que esto se trata de una Guía de Drones para Completos Ignorantes, simplemente vamos a detallar por encima de qué van estos modos.
La configuración de los modos se puede activar por medio de los canales auxiliares AUX, que son los interruptores en tu TX. Estos modos pueden ser:
- Arm. Armado. Pone el dron en un estado listo para volar en cuanto se accione el acelerador
- Angle. Angulo. Para este modo y el que sigue puedes consultar nuestro tutorial sobre modos asistidos de vuelo
- Horizon
- Headfree. Desconecta los movimientos en el eje de la guiñada de las entradas en los ejes de balanceo y cabeceo. Eso implica que el dron responde a los movimientos del mando en estos ejes de acuerdo a su posición relativa respecto de nosotros, independientemente de hacia donde esté orientado.
- Failsafe. Modo de seguridad. Es muy importante configurarlo para evitar accidentes en caso de que el dron pierda el enlace con el radiocontrol y se aleje volando.
- AntiGravity. Modifica la configuración PID cuando se realizan giros bruscos.
- HeadAdj. Resetea la orientación en el modo Headless.
- Beeper. Activa el zumbador.
- OSD Disable Switch. Para desactivar el OSD.
- Backbox. Activa y desactiva la caja negra.
- Airmode. No es muy fácil explicar en pocas palabras cómo funciona el Airmode. Su efecto es que mejora el control en las posiciones extremas del acelerador a cambio de sacríficar algo de acelerador máximo.
- FPV Angle mix. Algunos sistemas FPV permiten cambiar el ángulo de orientación de la cámara para acomodarlo a la velocidad de avance.
- Blackbox Erase. Permite el borrado de la caja negra.
- Camera Control 1, 2, 3 – Permiten por ejemplo el control de servos para la orientación de los gimbals de la cámara en una plataforma de fotografía aerea. También pueden servir para accionar controles de la cámara: encendido/apagado, modo foto/vídeo, entrada al menú OSD de la cámara, activación del Wifi de la cámara, etc.
- Flip over after crash, o vulgarmente llamado modo tortuga. Para dar la vuelta al dron a distancia tras un accidente
- Prearm. Como modo de seguridad previo al armado.
- VTX Pitmode. Permite el control de la potencia de emisión y del canal de la transmisión de video. Exige la presencia de un VTX que lo permita.
- etc.
Los modos de vuelo pueden ser combinados. Puedes por ejemplo situar Airmode en el mismo interruptor que el armado, o dejarlo en un interruptor diferente. Las dos cosas están bien. Puedes usar un interruptor de tres posiciones si pones en el mismo canal el armado, el modo ángulo y el airmode, por ejemplo.
Pestaña de Motores (Motors)
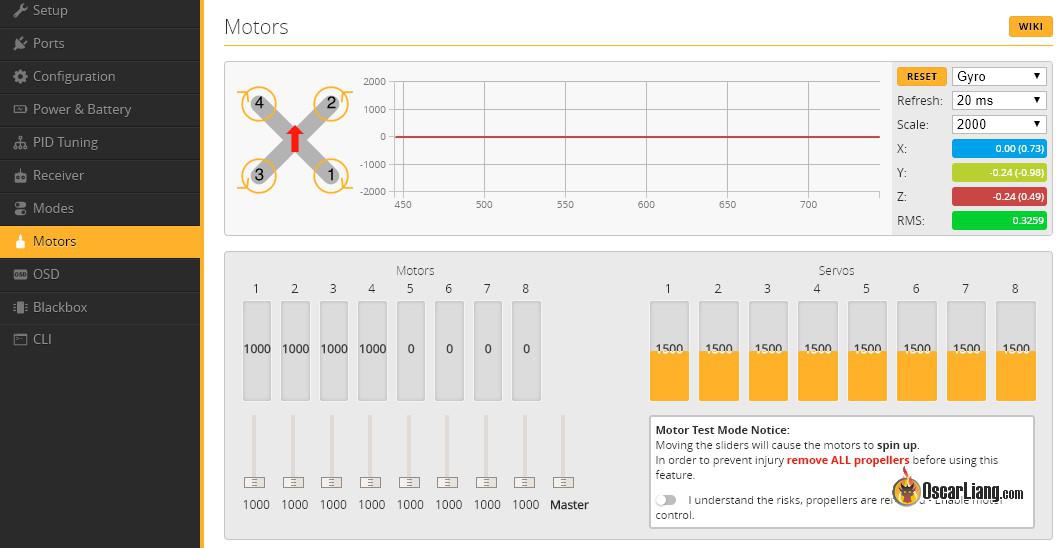
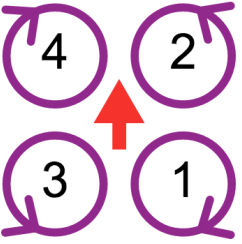 Revisa el orden de los motores:
Revisa el orden de los motores:
- Motor 1 detrás a la derecha
- Motor 2 delante a la derecha
- Motor 3 detrás a la izquierda
- Motor 4 delante a la izquierda
Si el orden está equivocado, puedes repararlo usando el remapeado de recursos.
Ahora revisa el sentido de giro de los motores. Si no es el correcto, no hace falta cambiar las soldaduras, puedes también cambiar la dirección de giro en la configuración de BLHeliSuite.
Pestaña de OSD
El OSD de betaflight es completamente configurable desde la aplicación. En su momento prepararemos un tutorial específico sobre cómo configurar bien el OSD de Betaflight.
Pestaña de Ajuste de los PID
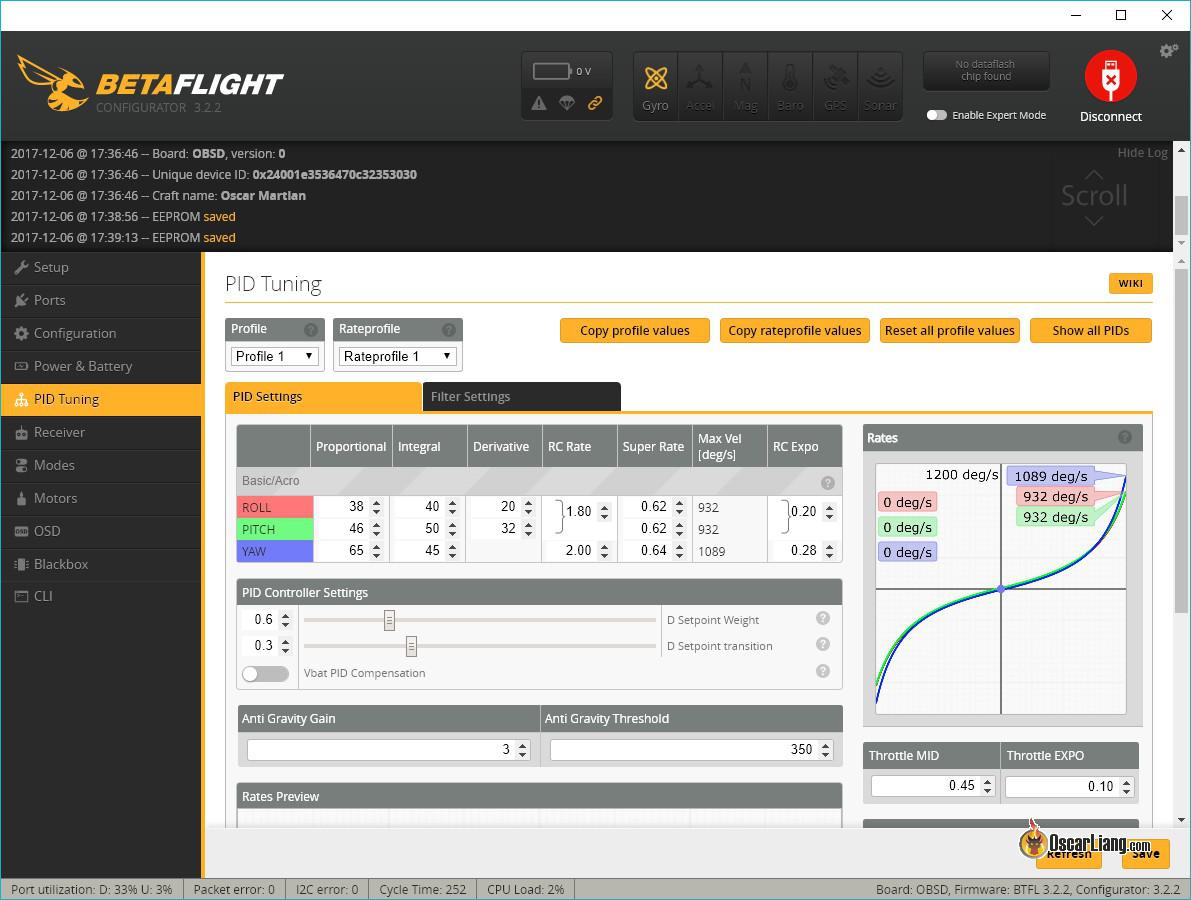
Realmente no tienes que cambiar nada para volar, pero el afinado de los PID, y ajustar los rates puede mejorar tu vuelo.
Los PID son en esencia tres parámetros que puedes ajustar en cada uno de los tres ejes (cabeceo, alabeo y guiñada).
Estos parámetros regulan la sensitividad, la tozudez y la amortiguación que tienen los movimientos del aparato respondiendo a las entradas en los mandos.
Para el ajuste de los PID es necesario comprender un poco el efecto que tienen estos parámetros en el comportamiento de vuelo. Prepararemos un tutorial específico para ajustar los PID que deberías mirar por lo menos cuando tu vuelo mejore un poco.
Rate, Super Rate y Expo también afectan a cómo el dron reacciona a las entradas del mando modificando las curvas de respuesta también prepararemos una guía sobre los ajustes de Rate / Super Rate y Expo.
Pestaña de Blackbox
No hace falta que entres en esta pestaña ahora que estás empezando.
Permite el borrado y la recuperación de datos de la caja negra. También permite cambiar la velocidad de muestreo de datos para la caja negra.
Pestaña de CLI
Tampoco es necesario que entres ahora en el CLI o Command Line Interface. Digamos que aquí se encuentra el verdadero entorno de programación de Betaflight. Si quieres conocer todos los parámetros de configuración de tu dron teclea «dump» en el CLI, y ésta se volcará en pantalla. Puedes utilizar cortar y pegar en un archivo de texto o en el block de notas, para tener esta configuración como respaldo por si tuvieras que volver a flashear el firmware.