Lo que hay que saber para elegir el controlador de vuelo (FC) en un multicóptero
Un nuevo post describiendo una de las partes esenciales de un multicóptero.
 Hoy nos toca el controlador de vuelo o FC (Flight Control). Usaremos Controlador, controladora y control indistintamente, que nadie nos acuse de sexismo!!
Hoy nos toca el controlador de vuelo o FC (Flight Control). Usaremos Controlador, controladora y control indistintamente, que nadie nos acuse de sexismo!!
El controlador de vuelo es una tarjeta integrada que viene a ser el cerebro del pájaro. El FC contiene un procesador que interpreta las señales recibidas por el receptor de radio (RX) y emite las señales adecuadas a los controladores electrónicos de velocidad de los motores (ESCs) para que el dron vuele cómo y donde nosotros queramos.
El controlador de vuelo también es el centro neurálgico que contiene o donde se conectan todos los sensores (giroscopios, acelerómetros, GPS, barómetro. magnetómetro, sonar, etc.) y todos los periféricos de salida (telemetría, caja negra, buzzer, LEDs, OSD, servos, etc.) que puede llevar el aparato.
Los controladores de vuelo más modernos tienen cada vez más puertas serie para conectar un número mayor de dispositivos, porque la tendencia hoy es claramente centralizar el control de todos los dispositivos que pueda llevar el aparato a través del FC, así pues, hoy se pueden incluso encontrar cámaras HD (como la RunCam split 2) que permiten su manejo por medio del radiocontrol a través del FC.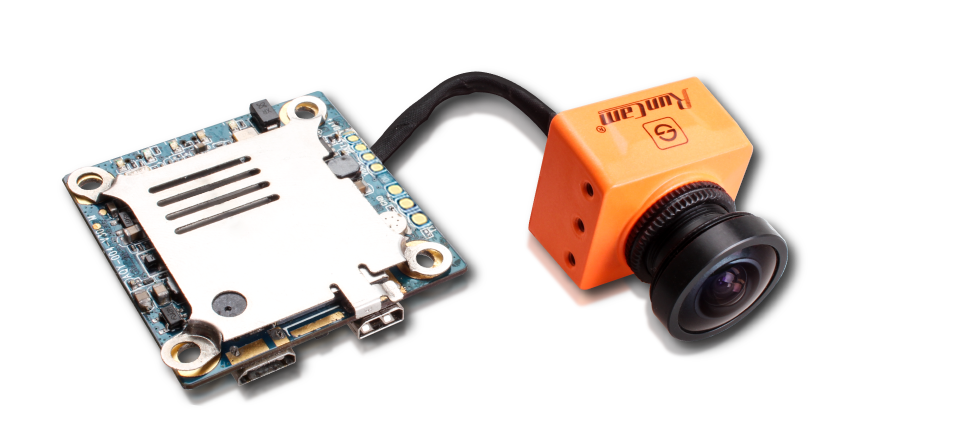
Incluso para un sistema en principio completamente independiente y paralelo a los sistemas de vuelo, como la cámara FPV y el transmisor de vídeo VTX, las ventajas de poderse conectar al FC son evidentes: Es posible introducir un canal de datos (OSD) superpuesto sobre la señal de vídeo, y algunos transmisores de vídeo (como el MATEKSYS VTX-HV w/BFCMS Control) permiten el cambio de canal y de la potencia de salida por medio del mando de radiocontrol.
Como puedes ver, para tratarse de una tarjeta integrada no mucho más grande que un sello de correos, el FC es un dispositivo tremendamente potente. Resulta increible la cantidad de tecnología encapsulada de forma tan compacta para nuestro gozo y disfrute. Me recuerda una pegatina que vi una vez pegada en un coche. Decía:
DISEÑADO POR COMPUTADORAS
CONSTRUIDO POR ROBOTS
CONDUCIDO POR UN IMBÉCIL
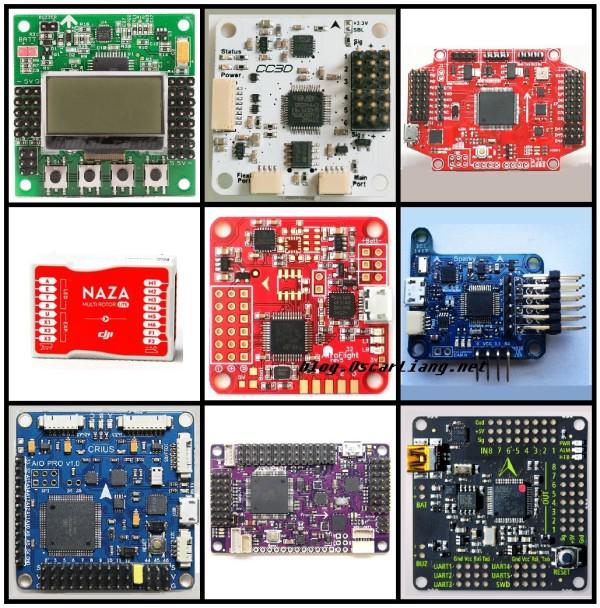
El simple número de FCs disponibles para mini quad en el mercado puede apabullar a los principiantes.
Esta guía intentará explicar los factores importantes a la hora de elegir un FC para tu mini quad.
Si eres nuevo en esto asegúrate de mirar nuestra GUIA DE DRONES PARA COMPLETOS IGNORANTES
Indice de contenido
- Qué es un controlador de vuelo
- FC firmware
- Consideraciones al elegir el FC para un mini quad
- Procesador
- Giroscopio
Qué es un controlador de vuelo
El controlador de vuelo (FC) es el cerebro del aparato. Básicamente es una placa de circuitos integrados que incluye sensores que detectan cambios de orientación. También recibe comandos de usuario y controla los motores para mantener el cuadracóptero en el aire.
Casi todos los FC incluyen los sensores básicos de giroscopios y acelerómetros (Gyro y Acc). Algunos FC pueden incluir sensores más avanzados como barómetro, y magnetómetro (compás o brújula).Los FC también son el núcleo al que se conectan diferentes periféricos como el GPS, LEDs, sensor ultrasónico, etc.
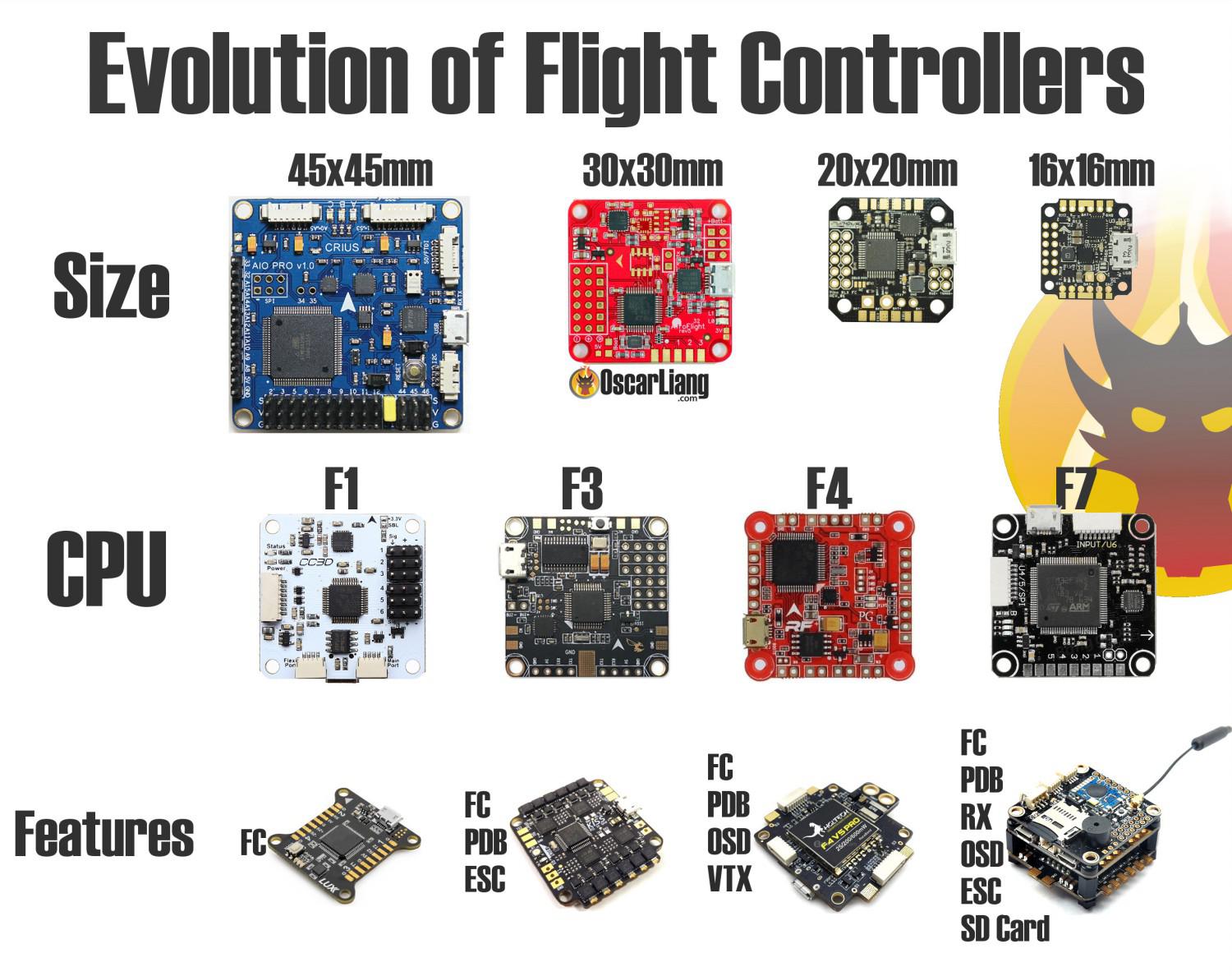
Los FC para cuadracópteros están evolucionando rápidamente: cada vez son más pequeños, usan mejores procesadores y hardware y tienen más y más funciones integradas
Firmware
 Además de las diferencias en el hardware, los FC también usan diferente firmware que puede estar especializado en distintas aplicaciones. El firmware moderno de los FC normalmente puede ser configurado vía software con una computadora o un smartphone. “Tuning” o afinado, es el término que se utiliza cuando se ajustan los PID y otros ajustes de configuración que cambian cómo se comporta el multirrotor. El GUI (Graphic User Interface o Interfaz Gráfica de Usuario) y los parámetros son distintos en cada firmware, así que cada uno de ellos tiene su pequeña curva de aprendizaje.
Además de las diferencias en el hardware, los FC también usan diferente firmware que puede estar especializado en distintas aplicaciones. El firmware moderno de los FC normalmente puede ser configurado vía software con una computadora o un smartphone. “Tuning” o afinado, es el término que se utiliza cuando se ajustan los PID y otros ajustes de configuración que cambian cómo se comporta el multirrotor. El GUI (Graphic User Interface o Interfaz Gráfica de Usuario) y los parámetros son distintos en cada firmware, así que cada uno de ellos tiene su pequeña curva de aprendizaje.
Si no tienes absolutamente ninguna idea de por donde empezar a elegir, mi recomendación es, sin duda Betaflight. También Raceflight y KISS aunque estas dos son de código cerrado (por explicarlo de un modo sencillo, KISS es como Apple y Betaflight es como Linux). Las tres tienen excelente comportamiento en vuelo y con ellas no te puedes equivocar.
Una vez has escogido el firmware, ahora puedes mirar que tarjetas FC son compatibles
El procesador.
Actualmente hay cuatro tipos de CPU entre los que elegir: F1, F3, F4 y F7. Recomendamos adquirir un F3 o un F4. El F1 está prácticamente discontinuado y el F7 todavía necesita un tiempo para ser mejorado

|
F1 |
F3 |
F4 |
F7 |
|
72MHz |
72MHz |
168MHz |
216MHz |
Más adelante publicaremos un post para que puedas aprender más acerca de las diferencias entre los Procesadores F1. F3, F4 y F7
Número de UART’s y de Inverters
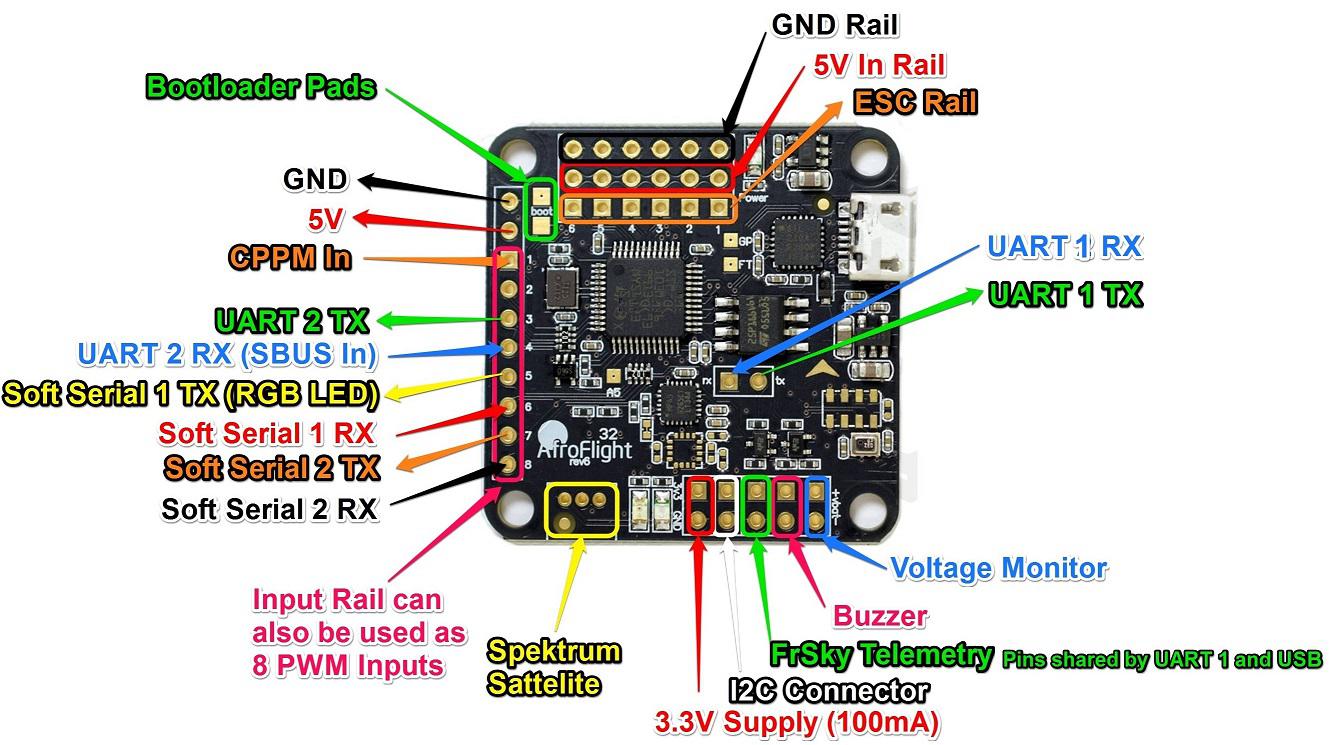
Un UART es un puerto serial de hardware que te permite conectar dispositivos externos como un receptor digital (SBUS y Spektrum), el OSD, Telemetría, transpondedor de carrera, control de VTX, etc.
Cada UART tiene 2 pines. TX para transmitir datos y RX para recibirlos. El número de UARTs depende del tipo de procesador y de la placa base en la que está montado. Por ejemplo, los FC con un F1 tienen normalmente dos UART, mientras que los F3 y F4 pueden tener de tres a cinco y un F7 puede tener ocho o más.
Número de Transmisores/Receptores Asíncronos Universales UART
|
F1 |
F3 |
F4 |
F7 |
|
2 UARTs |
3-5 UARTs |
3-5 UARTs |
8+ UARTs |
Por algún motivo, las señales de Frsky SBUS y SmartPort están invertidas, y por tanto se requiere un inversor en el UART para leer estas señales.
Algunos FC con F1 y F4 no tienen inversores integrados, o los tienen en un número muy limitado. Los usuarios de las radios Frsky podrían meterse en problemas con estas tarjetas, pero en cualquier caso se puede trabajar alrededor de este problema usando un inversor externo, o consiguiendo una señal del RX que no esté invertida. Los FC con F3 y F7 no tienen este problema porque todos ellos tienen UARTs con inversores integrados.
En cualquier caso, si se te acabasen los puertos serial de hardware, siempre puedes usar la función “soft serial” que es una forma de emular puertos UART usando software. La desventaja es la velocidad de comunicación con los periféricos más baja, y que hay más carga de trabajo en la CPU, por ello esta opción no se recomienda para tareas críticas como la recepción de radio RX.
Giroscopios. El tipo de IMU y BUS
El sensor IMU usado en un cuadracóptero puede ser encontrado en la siguiente lista. El trabajo de un sensor IMU es medir el movimiento y orientación del cuadracóptero.
|
IMU |
Protocolo de Comunicación Posible (BUS) |
Máxima frecuencia efectiva de muestreo en el giroscopio |
|
MPU6000 |
SPI, i2c |
8K |
|
MPU6050 |
i2c |
4K |
|
MPU6500 |
SPI, i2c |
32K |
|
MPU9150 |
i2c |
4K |
|
MPU9250 |
SPI, i2c |
32K |
|
ICM20602 |
SPI, i2c |
32K |
|
ICM20689 |
SPI, i2c |
32K |
El número de modelo del CHIP MPU se puede encontrar en el FC.
El Sensor giroscópico IMU en el FC
 Hay dos propiedades fundamentales de un sensor IMU en un FC que debemos considerar. La velocidad máxima de muestreo y cómo de susceptible es al ruido, tanto eléctrico como mecánico.
Hay dos propiedades fundamentales de un sensor IMU en un FC que debemos considerar. La velocidad máxima de muestreo y cómo de susceptible es al ruido, tanto eléctrico como mecánico.
Actualmente el IMU más ampliamente usado es el MPU6000 que soporta una velocidad de muestreo de 8 KHz y ha probado ser una de las IMU más robustas frente al ruido. El consenso general es evitar las MPUs (incluyendo la MPU6500 y la MPU9250) que aunque tienen mayor velocidad de muestreo son más sensibles al ruido.
Dotar de monturas blandas a tu FC y añadir un Condensador de bajo ESR (Equivalent Series Resistance) a tu controlador de vuelo podría ayudar a reducir el ruido que soporta el IMU. Una nota sobre los condensadores ESR: en la tienda de electrónica cerca de mi casa ni sabían lo que eran, pero para eso está la wikipedia…, acabaremos haciendo un post de condensadores ESR, filtros LC y otras formas de reducir el ruido electrónico en los circuitos de tu dron, pero en resumen, simplemente se trata de que el aparato vuele mejor y el vídeo FPV se vea mejor).
Los dos tipos de BUS, o protocolos de comunicación que conectan el sensor IMU al procesador son el i2c y el SPI. El tipo de BUS puede tener un impacto significativo en la velocidad efectiva de muestreo en el sensor y por tanto en el máximo tiempo de bucle en el FC.
El BUS preferido es el SPI, que permite al giroscopio una velocidad de refresco mucho más rápida que en el i2c que sólo permite 4 KHz
El,MPU9150 es de hecho un MPU6050 con un magnetómetro AK8975 integrado, mientras que el MPU9250 es el MPU6500 con el mismo magnetómetro.
Cada vez hay más FC que usan ahora el ICM20602, por ejemplo el Raceflight Revolt V2, así como el ICM20689 del Kakute F4. Ambos pueden funcionar a 32 KHz, pero se dice que estos IMUS son más susceptibles al ruido que los viejos MPU 6000 por lo que suelen requerir monturas blandas y filtros condensadores.
Se empiezan a ver FC con el giroscopio montado en blando. Básicamente tiene el IMU encima de una pieza de foam para reducir así parte del ruido proveniente de los motores.
Otras consideraciones a la hora de escoger un FC
Aquí hay una lista de otras consideraciones a la hora de elegir un FC.
La caja negra: Memoria flash o tarjeta SD?
Los datos de la caja negra son útiles para afinar el quad y también para detectar problemas. Hay dos formas de grabar tus datos de caja negra. Si tu FC soporta registros de caja negra, lo normal es que venga con un chip de memoria flash o con un lector de tarjetas SD. La memoria flash es más barata, pero también es mucho más limitada en cuanto a cuanto tiempo puedes grabar de tu vuelo. Normalmente puedes grabar 10, 15 ó 20 minutos de vuelo, dependiendo de tu velocidad de registro. También descargar los datos es muy lento, y puede llevar hasta cinco minutos descargar un solo minuto de vuelo. Los FC con un lector de tarjetas SD te permiten introducir una tarjeta de memoria (por la que por algún extraño motivo has pagado un dinerito para la SGAE) y puedes grabar durante días o semanas sin preocuparte si te queda memoria. También leer los datos es muy rápido. Sacas la tarjeta y puedes acceder al registro inmediatamente. En mi opinión depende de cuanto uses la caja negra. Si te apasiona estudiar los datos de la caja negra deberías conseguir un FC con un lector de tarjetas incorporado. Es bueno que sepas que siempre puedes conectar un lector de tarjetas SD externo (Open Logger) a uno de los UARTS de tu FC.
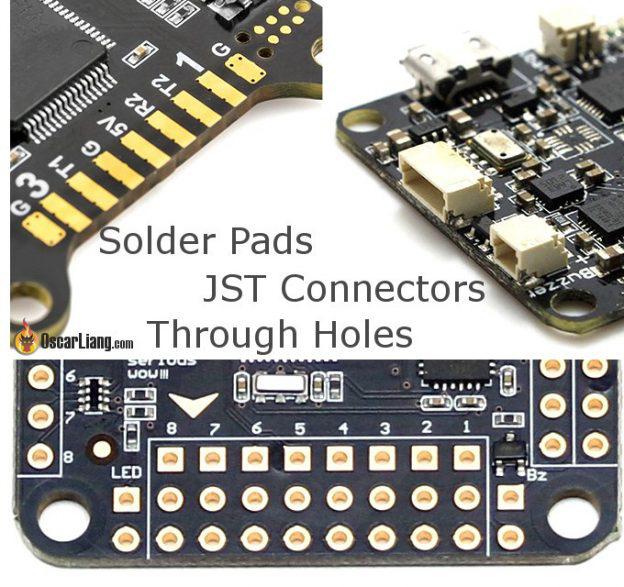
Si tienes una mínima destreza soldando, lo mejor es evitar los conectores JST porque ofrecen menos fiabilidad, aunque la conexión y desconexión es sencilla. Los pads son más fiables, pero algunas veces, las tarjetas de mala calidad, tienden a romperse cuando se calientan con el soldador. Los conectores que son agujeros también están bien porque permiten bien soldar directamente o bien usar pines de cabecero.
Si piensas que soldar no es lo tuyo, te animamos a mirar nuestro manual de soldadura.
Regulador de voltaje integrado
Con un regulador de voltaje integrado en el FC, este puede alimentarse directamente desde la batería LiPo e incluso proporcionar salidas a 5 V y 12 V para otro equipo. También significa que tu FC puede monitorizar la batería también sin cableado extra de VBAT.
PDB integrado
Cuando el PDB está integrado en el FC como una sola tarjeta, tanto tus ESCs, como tu batería LiPo pueden ser conectadas directamente al FC y no hace falta un PDB adicional o ningún cableado adicional (una tarjeta versus dos tarjetas). La desventaja es que aveces los pads para soldar minúsculos pueden hacer el trabajo muy difícil dado lo pequeño del espacio.
Sensor integrado de corriente
Tener un sensor integrado de corriente ha probado ser invaluable, mucho mejor que VBAT para saber cuando deberías aterrizar y una buena herramienta para probar.
Botón de boot.
Un botón de cargado permite poner al FC en modo de bootloader cuando se presiona. Esto te permite grabar (flashear) un nuevo firmware si es que el firmware normal no va bien.
Originariamente, los FC proporcionaban 2 pads para soldar un puente cuando se requería ir a modo bootloader. Con un botón esto es mucho más fácil.
Otras funciones que puedes encontrar en los FCs
OSD integrado – El MinimOSD está muy bien, pero la configuración con su propio programa independiente, el MWOSD Configurator, es bastante incómoda comparado con trabajar directamente sobre el FC sin salir de Betaflight, Si te gusta el OSD, esta es una función que debes tener.
VTX integrado – El mayor beneficio es el ahorro de peso y su compacidad. Algunos te permiten incluso cambiar los ajustes de VTX directamente desde el FC.
Barómetro / Magnetómetro – Estos sensores extras son menos importantes para las carreras de mini quads.
Apoyo de RX – Se asegura de que el FC soporte el tipo de protocolo radio receptor que piensas usar, como PWM, PPM, SBUS, Spektrum Satellite, etc. Si se trata de un receptor FrSky por ejemplo, se puede tener una conexión para la telemetría SmartPort y una entrada RSSI además de la conexión SBUS.
Opciones AIO (All In One) – Los controladores AIO tienen todo lo necesario integrado en una sola tarjeta, como los ESC, PDC, RX, etc. La desventaja es que si uno de los elementos falla , lo más seguro es que tengas que cambiarla entera.
Transpondedor de infrarrojos
Te permite usar un detector de infrarrojos con el FC para medir el tiempo de vuelta directamente con el FC en las carreras