[box type=»info-box»]Siempre me han gustado esas imágenes de “antes de – después de”, como la del chiste ese de “Después de treinta días de dieta Antonio perdió las gafas“, y por ello he aprovechado la oportunidad de hacer un tutorial sobre los filtros LC con imágenes comparativas que ilustren la mejora conseguida. Éste será además mi tercer vídeo tutorial, cuarto contando la intro. Podéis encontrarlos todos en el índice.
Ya de paso aprovecho para seguir trabajando con Dumbo, el dron sencillo y económico chino. La idea es que podáis ver todo lo que unos pequeños filtros pueden hacer por la calidad de la imagen de un equipo que no es bueno y caro.
Dumbo es un dron relativamente grande,y su chasis es muy amplio y permite montar todos los periféricos con comodidad. Me costó hacer que Dumbo volase, todo el problema que tenía era un motor malo (casualidades de la vida, no hemos vuelto a ver esto), pero no logré dar con él a la primera.
Lo interesante de Dumbo, es que en este hobby, cualquiera de los elementos de un aparato se puede mejorar individualmente, con lo que no existe una base mala para partir, simplemente porque esa base puede reemplazarse por otra diferente por relativamente poco dinero.
Si os interesa saber que fue de Dumbo, hoy día es un dron maduro con un controlador de vuelo AnyF7 FC, la cámara sencilla de tarjeta fue sustituida por una cámara Runcam Split2 para grabar en HD (aprovechando que el chasis de gato muerto permite grabar sin que aparezcan las hélices) y el VTX económico fue cambiado por un Matek con potencia de salida y canal regulable desde el FC. Ahora además tiene un GPS Tarot para la navegación, una MicroMinimOSD y telemetría SmartPort en el receptor FrSky.
La verdad es que el dron es un poco demasiado grande para hacer muchas acrobacias y un poco demasiado pesado para ser muy eficiente con la batería, pero no deja de ser un dron de carreras y vuela rápido y francamente bien. Lo tengo de base para experimentar con iNav y cosas parecidas. El próximo paso sería probar con otros motores de menos KV (quizás 1800), y puede que unas hélices de 6 pulgadas que parece que el chasis admite y tal vez una batería más grande. Como podeis ver, Dumbo creció y sigue creciendo.
Los filtros LC son uno de los tipos de filtro más básicos en electrónica. Un filtro LC en su forma más básica, se compone simplemente de una bobina y de un condensador, Este tipo de circuito es ampliamente utilizado por los aficionados a este hobby para suprimir o atenuar en la señal de vídeo el ruido electrónico generado en los circuitos por los motores y los variadores.
Qué es un filtro LC y cómo mejora la experiencia FPV
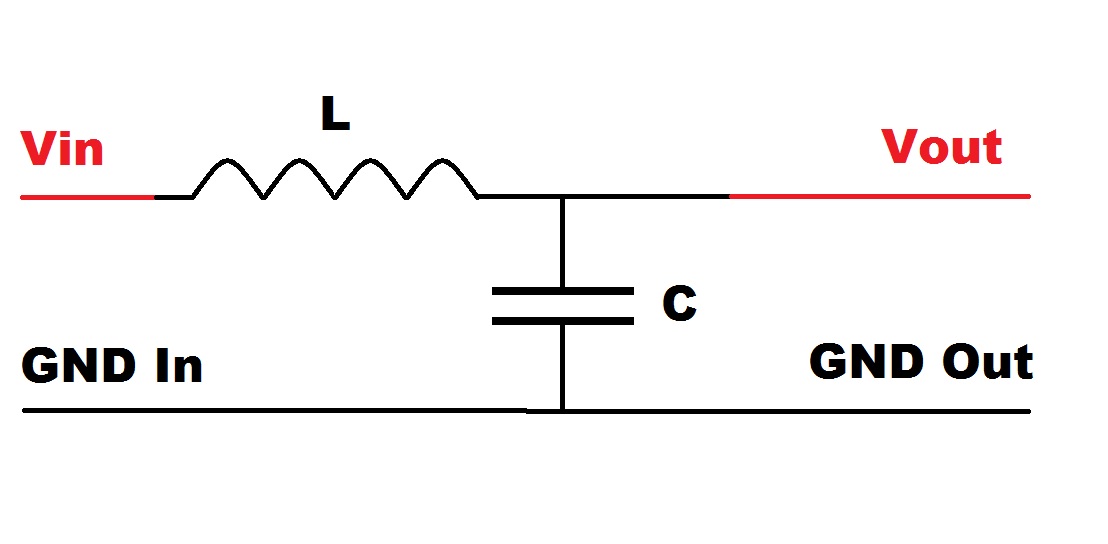 Si despiezamos un filtro LC simple, encontraremos una bobina y un condensador.
Si despiezamos un filtro LC simple, encontraremos una bobina y un condensador.
La bobina o inductor se resiste a los cambios en la corriente que fluye a través de él, mientras que una resistencia se resiste a los cambios en el voltaje.
Además de la limpieza en la señal del vídeo transmisor y de la cámara, la ganancia de la antena, el alcance del sistema FPV y la calidad de la transmisión también dependen de cuánto ruido hay en nuestro sistema eléctrico. Si tienes una fuente independiente de alimentación (otra batería) para el sistema FPV, no deberías tener ningún problema de ruido.
Pero hablando en general, cuando tu fuente principal de potencia es compartida tanto por los motores como por el vídeo, ésta se vuelve ruidosa, y pueden aparecer líneas blancas horizontales en la pantalla FPV.
Cuando el multirrotor vuela, la velocidad del motor está continuamente cambiando para mantener el aparato nivelado en el aire. Estos cambios continuos en la velocidad implican cambios en la corriente extraída por los motores y también fluctuaciones en el voltaje. Eventualmente, todo esto se traduce en ruido electrónico en el circuito.
La mayor parte de los VTX requieren alimentación a 12V, por lo que pueden ser conectados directamente a una LiPo 3S. Si el cuadracóptero funciona con una batería 4S, puede ser necesario el uso de una fuente de potencia regulada (BEC) a 12 V. La mayoría de los PDB incluyen estos reguladores de voltaje que suelen tener un cierto nivel de filtrado, que puede ser mejorado con el uso de filtros LC.
En el siguiente vídeo tutorial puedes ver como unos filtros LC son capaces de mejorar la imagen FPV recibida.
Construir un filtro LC
Las características del condensador y de la bobina afectan a la capacidad de supresión de ruido en determinada frecuencia, así que en un mundo ideal, para diseñar un filtro LC eficaz, teóricamente habría que identificar las frecuencias que se quieren filtrar. Lo cierto es que, en la práctica, mucha gente utiliza condensadores y bobinas eligiéndolas aleatoriamente y estos filtros parecen funcionar, así que después de todo, una elección precisa puede que no tenga tanta importancia.
Para elegir el condensador, debes verificar que el voltaje soportado por el mismo es mayor que el que utilizará el dron. En cuanto a la bobina, se puede construir una con un anillo de ferrita.
En mi opinión, construir un filtro LC, aunque sea una tarea sencilla, no tiene demasiado sentido cuando se pueden encontrar en el mercado filtros ya ensamblados bien construidos y que son muy compactos y ligeros, como los filtros LC FlyFox de 1 A (10 mm x 4 mm, 0.2 g, 1S-4S). En caso de comprar un filtro LC ya construido, debes verificar que el amperaje soportado pueda con la potencia consumida al voltaje operativo.

CONCLUSION
Los filtros LC son fantásticos porque son una forma sencilla y barata de atenuar el ruido electrónico en el circuito eléctrico del dron, consiguiendo de este modo limpiar la señal de vídeo.