Introducción
Antes de ponernos a construir y programar el robot cuadrúpedo hay que darle una vuelta y entender qué es lo que queremos conseguir, que no es otra cosa que utilizar una impresora 3D y algunos componentes electrónicos para construir un robot que trate de imitar (con ciertas limitaciones) el movimiento de un animal de cuatro patas.
Las limitaciones nos van a venir impuestas sobre todo por el número de articulaciones. Nuestro robot va a tener una única articulación que se va a poder mover en dos direcciones, horizontal y verticalmente. Algo parecido a nuestros hombros, de forma que podríamos decir que no tiene rodilla.
De todas formas esto nos va a permitir levantar y bajar las patas, así como moverlas hacia delante y hacia atrás, suficiente para conseguir que el robot ande y haga alguna que otra cosa curiosa.
Después de construirlo lo primero que vamos a hacer es programar los diferentes movimientos que queramos que pueda hacer el robot, que en principio serán:
- Ponerse de pie.
- Tumbarse.
- Inclinarse hacia cualquier lado.
- Andar.
- Saludar.
Una vez tengamos eso hecho y probado ya podemos jugar con diferentes modos para controlarlo. El que más nos ha llamado la atención es controlar el robot con un Nunchuk de la Wii, porque además de incorporar un joystick y dos botones, vamos a poder manejar al robot mediante el movimiento del propio mando, aprovechándonos de los acelerómetros que incluye. Pero la cosa no queda ahí, porque podemos hacerlo de cualquier otra forma, por ejemplo, con un móvil mediante Bluetooth o por radiofrecuencia construyendo nuestro propio mando. O, si queremos que se comporte de forma autónoma, podemos incorporarle sensores como puede ser de distancia o sigue líneas, para dotarle de cierta “inteligencia”.
Aquí tenéis un vídeo con una de las pruebas que hemos hecho donde podéis ver cómo funciona.
Materiales necesarios
Piezas imprimibles
El diseño de este robot es una adaptación del que este otro encontrar en la página thingiverse: https://www.thingiverse.com/thing:38159. Hemos adaptado las dimensiones y los diseños de algunas de las piezas para que encajen mejor y añadido una pieza a modo de plataforma en la que poder colocar el Arduino. Podéis descargar el diseño de las piezas aquí: Piezas 3D Cuadrúpedo.
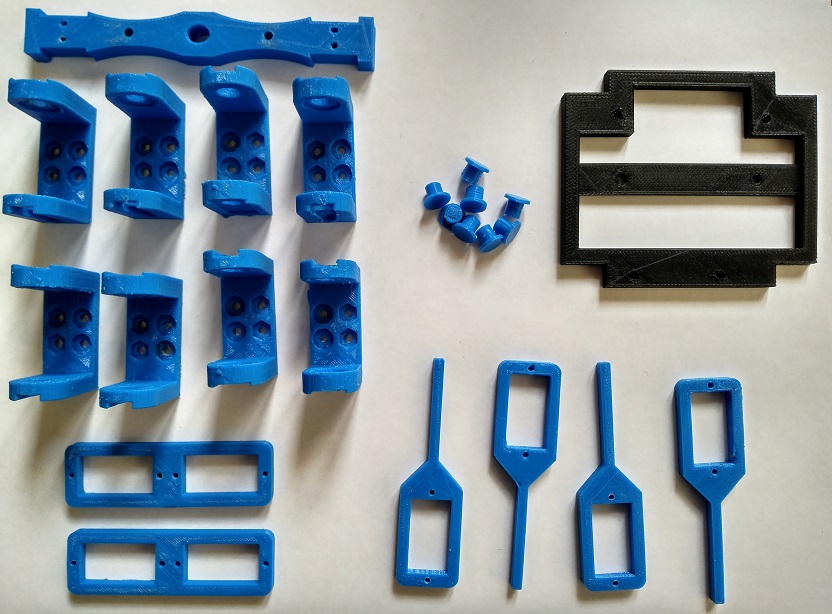
Para poder montar la estructura del robot necesitamos las siguientes partes:
- 1 pieza sujeción de Arduino.
- 4 piezas de pierna.
- 2 piezas de cadera.
- 1 pieza columna.
- 8 piezas hombros.
- 8 botones para los servos.
- Tornillería.
- 12 tornillo m3x10.
- 8 tuercas m3.
- 2 separadores hembras m3x30.
- 4 tornillos m2x19.
- 16 tornillos m2x10.
- 20 tuercas m2.

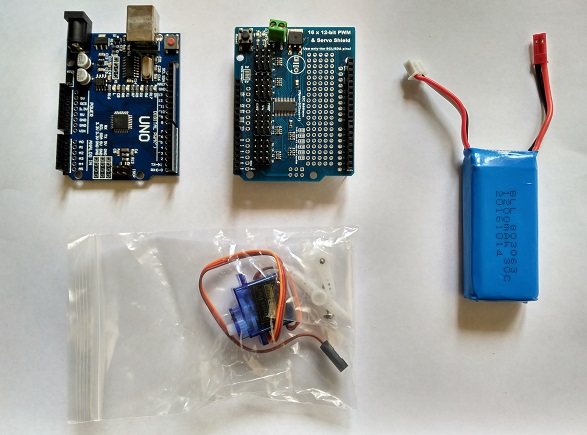
Electrónica
Además de las piezas de plástico vamos a necesitar la parte electrónica que realmente moverán el robot y serán su “cerebro”.
- Un Arduino Uno.
- Un shield para controlar los servos.
- Una batería.
- 8 servos 9G sg90.
Instrucciones de montaje
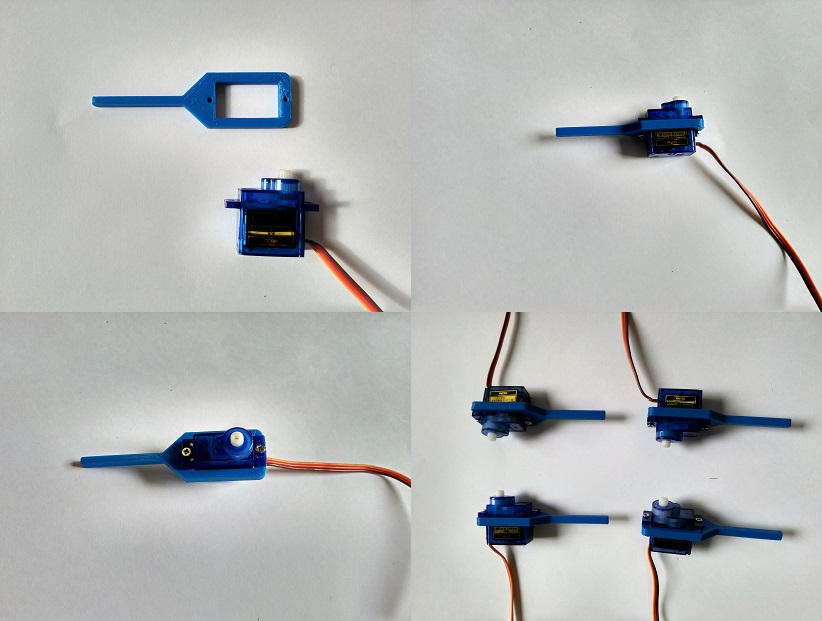
Antes de montar nada tenemos que asegurarnos de que conocemos el ángulo de todos los servos, para que una vez enganchados en la estructura sepamos que el ángulo corresponde a la posición que queremos. Más adelante lo entenderéis mejor, de momento lo que tenemos que hacer es cargar el programa que está un poco más abajo en el Arduino e ir conectando uno por uno cada uno de los 8 servos al pin 9 para asegurarnos que están todos a 90º.

Y ahora sí, ya es hora de ponernos al lío, aunque como veréis el montaje es bastante sencillo. Incluso nosotros hemos podido hacerlo… Eso sí, es importante que sigamos bien cada paso, fijándonos bien en la posición en la que vamos a colocar las cosas, ya que si no, aunque serviría igual, la programación cambiaría un poco. Os iremos avisando de todo lo que sea importante.
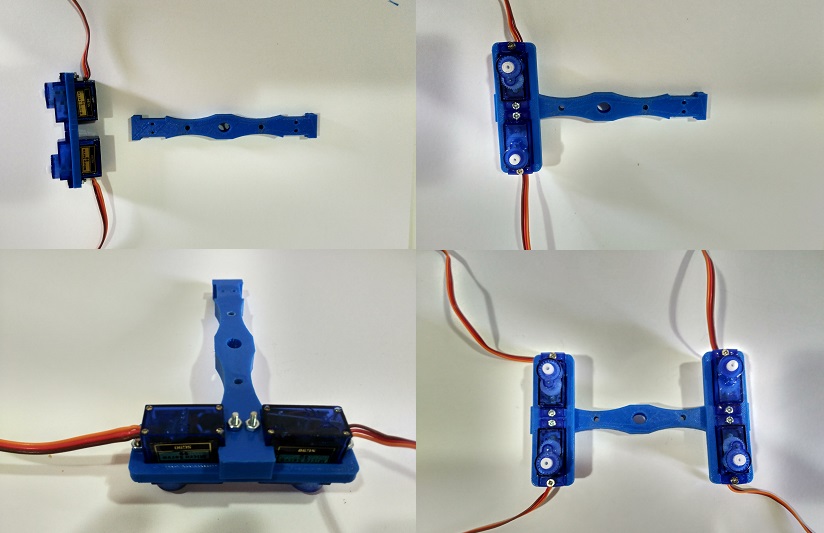
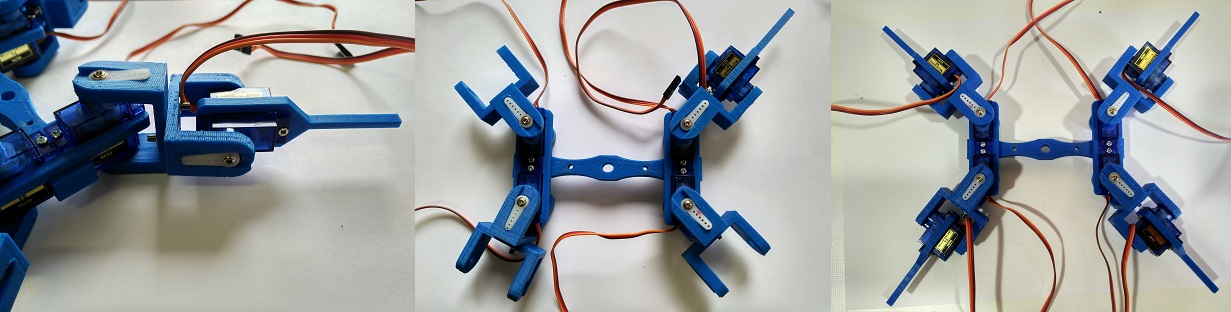
Lo primero que vamos a hacer es colocar los servos de las caderas del robot. Fijaros bien que la parte que rota la dejaremos hacia el exterior, y que de momento solo vamos a colocar los tornillos de la parte más externa. Usaremos tornillos de m2x10 y sus respectivas tuercas.

Y ahora engancharemos los dos conjuntos en la columna vertebral del robot, usando tornillos de m2x19 y tuercas.
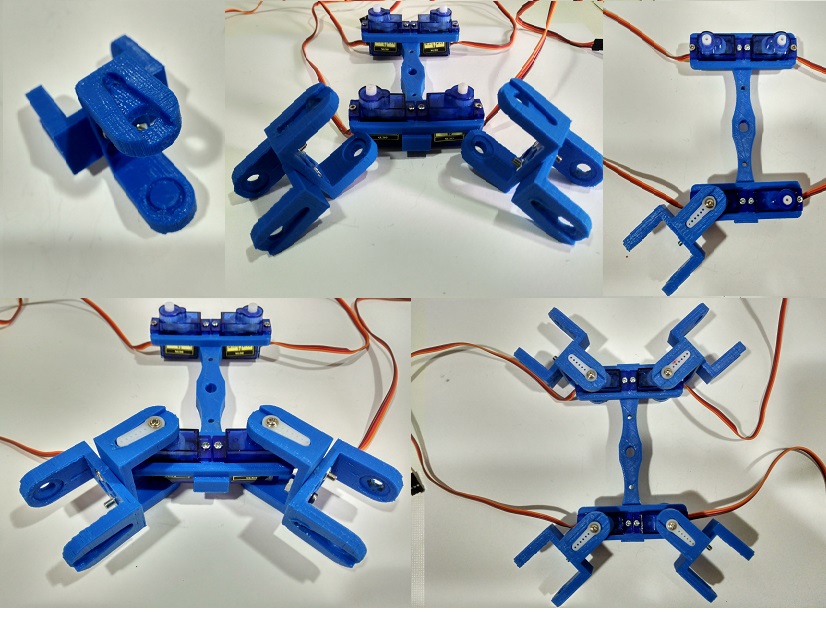
Ahora vamos a juntar las piezas de los hombros en parejas. Fijaros bien que tienen cuatro agujeros todas, 2 para tornillos y dos para tuercas. Como tiene que coincide un agujero de tornillos de una pieza con uno de tuerca de la otra, nos da la posibilidad de engancharlas de dos formas diferentes. Tenemos que hacer que dos conjuntos queden de una forma y los otros dos de otra. Hay que usar dos tornillos de m3x10 y dos tuercas por cada pareja. Se ve más claro en las fotos, o eso esperamos…
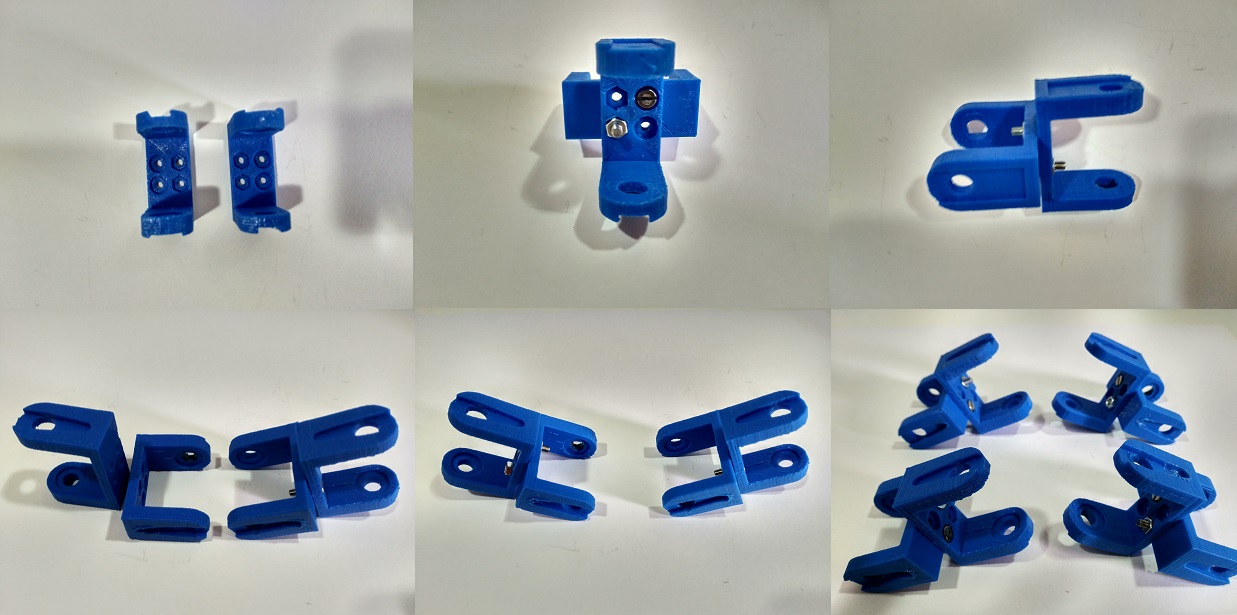
Y ahora vamos a enganchar estas piezas en lo que ya teníamos. Para hacerlo tenemos primero que poner el botón en uno de los agujeros y meter el servo dentro. Fijaros que hay dos agujeros, el que por la parte exterior tiene forma para una hélice es el del servo, y el otro el del botón. Cuando metáis el servo tratad de meter primero la parte blanca rotatoria en el agujero (igual tenéis que forzar un poco la pieza).
Además fijaros que nos tiene que quedar como las imágenes, la parte de la hélice del servo hacia arriba, y los agujeros para las hélices de la parte de los hombros que no tienen servo tiene que mirar hacia dentro. Una vez tengamos el servo colocado, tenemos que meter la hélice por el agujero de la pieza y encajarla en la parte rotatoria del servo. Cuando lo tengamos lo sujetamos bien con unos de los tornillos que vienen con los servos.
Vamos a pasar ahora a la parte de la pata. Primero vamos a colocar los servos en ellas, fijándonos en que la parte rotatoria tiene que quedar hacia el lado contrario de la parte que apoya el robot. Para sujetarlos usaremos tornillos de m2x10 y tuercas.
Y como no podía ser de otra manera, las integramos en el montaje sujetándolos a la parte libre de los hombros, de la misma forma que hemos hecho anteriormente.
Ya tenemos hecho lo más complicado, ahora vamos a colocar los separadores hembras en la columna para poder sujetar la pieza en la que irá colocado el Arduino. Los sujetamos con tornillos de m3x10 y colocamos el Arduino en el soporte, atornillándolo con 4 tornillos m2x10 y tuercas. Una vez este sujeto, le colocamos el shield para servos encima, cerciorándonos de que todos los pines están donde deben y colocamos la batería sujetándola con una brida como se ve en la imagen.
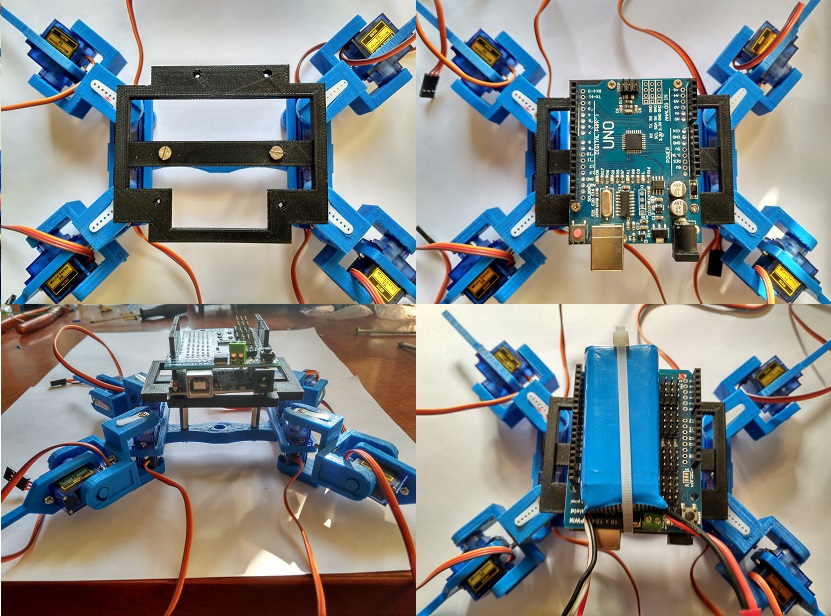
Y con esto tendríamos terminada la estructura, lo que nos deja el terreno preparado para empezar con las conexiones y la programación.
Resumen de la sesión
En esta sesión hemos aprendido varias cosas importantes:
-
- Hemos presentado el robot cuadrúpedo, entendiendo lo que queremos que haga.
- Hemos montado la estructura y colocado la electrónica del robot.
- Estamos preparados para empezar a programarlo.