Éste que sigue es un análisis en profundidad del Furibee Nebula 230. En él diseccionaremos el aparato, analizaremos los componentes uno por uno y realizaremos los cambios y ajustes para conseguir un dron funcional.
CHASIS
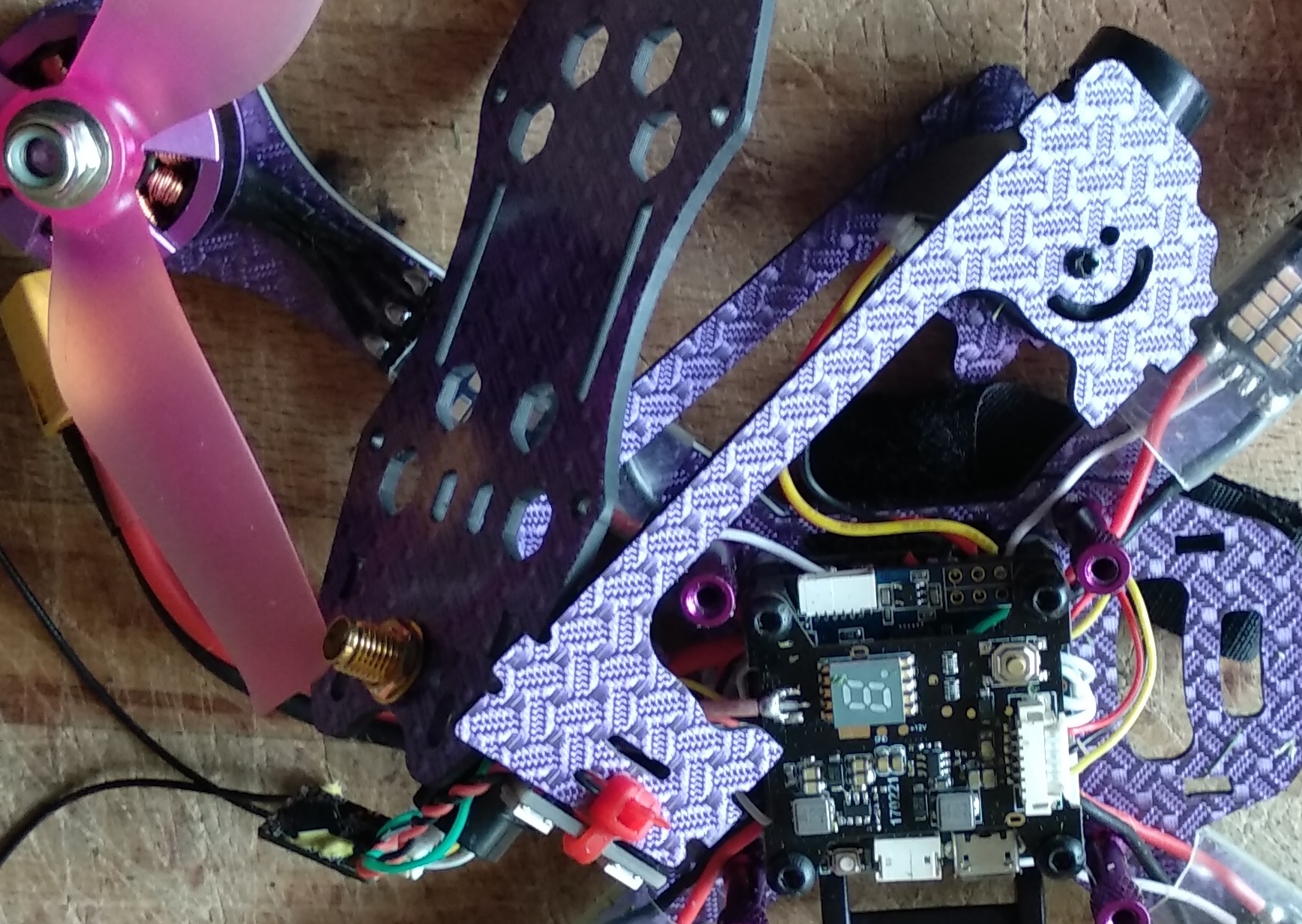
Empezaremos por el chasis. Parece un sandwich de fibra de carbono y otro material blanco. Se siente muy rígido y ligero. El acabado en color púrpura es de un gusto discutible.
La electrónica está protegida en cierta medida con unas placas laterales de fibra de carbono de 2 mm que también rigidizan el chasis al tiempo que sujetan la cámara y el buzzer. En principio parece buena idea para evitar que restos de hierba, etc acaben encima de las tarjetas electrónicas donde nada bueno pueden hacer, y tiene el único inconveniente de complicar el simple hecho de montar y desmontar el aparato hasta convertirlo en un pequeño infierno.
MOTORES
Los motores. Vienen con una tuerca cónica que no me gusta nada. Yo prefiero las tuercas autoblocantes de toda la vida, y como tengo un montón de ellas, lo primero es proceder a cambiarlas. Oh- oh… Primer problema: El eje es demasiado corto y el anillo de nylon de la tuerca no llega a roscar. Pruebo con otra hélice. Tampoco. Bueno, pues se queda así. No creo que la hélice se suelte. En cualquier caso prefiero las tuercas hexagonales a las cónicas simplemente porque las tuercas cónicas no caben en el dado de la llave que normalmente utilizo para soltar o poner hélices, y no quiero andar cargando además con una llave fija.

ESCs
Los ESCs o variadores vienen muy bien envueltos en los brazos con fundas termorretráctiles. Más adelante me veré obligado a cortar estas fundas.
Supuestamente los ESCs son, según las especificaciones publicadas por el fabricante, BlHeli 32 s. Es sorprendente por tanto, que al conectar el dron con el GUI de Betaflight, veamos que el protocolo de comunicaciones elegido para los motores es OneShot125. Lo cierto es que no he conseguido hacer que ningún protocolo DShot funcione, por lo que mi primera deducción es que los variadores no son los indicados en las especificaciones.
En la primera prueba que hago puedo ver que los motores números 1 y 4 giran en sentido inverso. Vaya! No esperaba eso en un dron RTF. Lo cierto es que me quedo perplejo cuando veo que puedo entrar en el BlHeli Configurator Suite y programar los ESCs y cambiar el sentido de giro. Así pues, los ESCs sí que son BlHeli después de todo, pero aún así, el único protocolo de comunicaciones que parecen que soportan es el OneShot 125.
He intentado cambiar el firmware de los ESCs para ver si puedo hacer que funcionen con algún protocolo DShot pero no hay manera. De lo malo-malo, funcionan con OneShot 125, y si algo funciona bien suele ser mejor no intentar arreglarlo, así que esto también se queda así.
Yo, la verdad es que soy incapaz de notar diferencias entre un protocolo y otro, y confieso que cuando me estrello contra un árbol, el protocolo de comunicaciones entre el FC y los ESCs es algo a lo que realmente no puedo echarle la culpa.
CALIBRACION DE LOS ESCs
Ya que estoy con ello voy a calibrar los ESCs. Esto es imprescindible hacerlo para todos los protocolos de comunicaciones no digitales. Muy fácil, se hace así.
- Conectas el dron a Betaflight
- Pestaña de motores – Entiendes los riesgos.
- Barra de «Master» a tope – Conectar batería – El dron pita
- Barra de «Master» a cero – El dron pita más – Los ESCs ya están calibrados
FC
El controlador de vuelo FC es un omnibus F4 con OSD. Este tipo de controlador no es uno al que yo tenga particular cariño, porque ya he quemado un par de ellos. Siempre se quema igual, el diodo que discrimina si la alimentación viene de la batería o del USB se chamusca y te quedas con un FC que se puede programar y no vuela o con uno que vuela pero no se puede programar. He visto algún vídeo de gente que es capaz de reparar el diodo, pero debo admitir que esto está muy por encima de mis capacidades.
Lo cierto es que yo prefiero los FC que tienen ya incorporado el PDB, como el KAKUTE F4 o el MATEL CR405, simplemente por sencillez de cableado y porque suelen ser mucho más robustos frente a cortocircuitos, es decir, que no se queman tan fácil, pero también son bastante más caros que una combinación FC + PDB
PDB
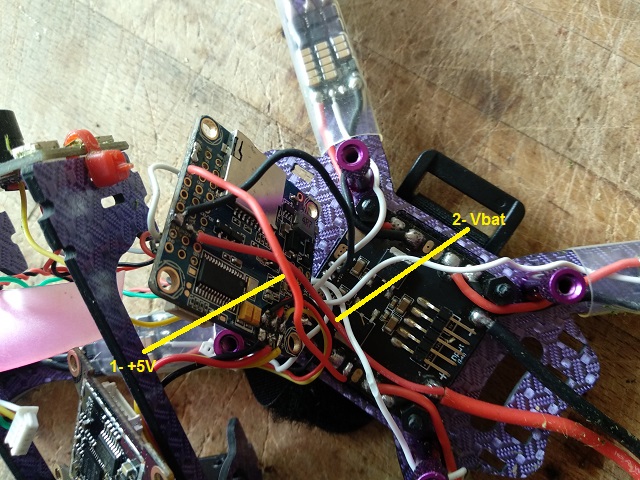
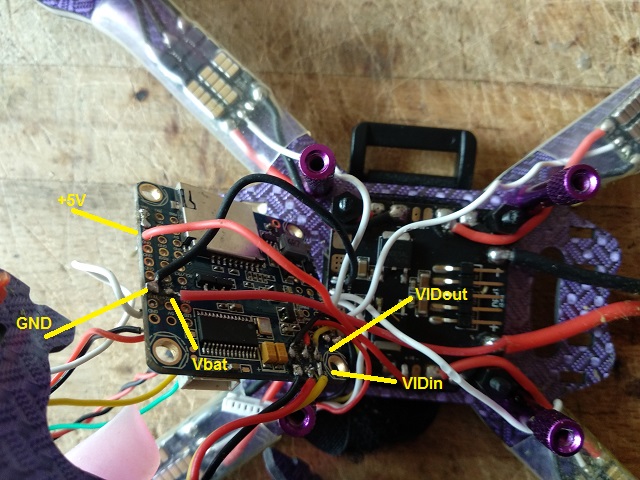
El PDB parece correcto, con salidas a 12 V y a 5 V que… no está conectada? Compruebo los voltajes con el polímetro y son correctos, pero veo que han alimentado la placa FC con la toma de 12 V directamente a Vbat. Es decir, la placa tendrá alimentación porque tiene incorporado un regulador de voltaje, pero el sensor de voltaje de la batería no funcionará correctamente.
La solucion es sencilla:
- un nuevo cable del 5V+ del PDB a cualquier toma etiquetada como 5V en el FC.
- Además, en el PDB suelto el cable del 12V+ y lo sueldo al positivo de la toma de la batería.
VIDEO
El equipo de vídeo casi merece un capítulo aparte. En los vídeos de crítica había visto a la gente quejarse de la estrechez del campo visual. Bueno, eso se arregla con un objetivo que vale tres euros, así que no le veo mayor problema, pero la verdad es que yo no he sabido ver esa estrechez, y aunque tampoco soy un hacha volando entre puertas en carreras, dudo que una diferencia de 10 o 20 grados en el ancho del campo visual sea tan crítica para mi.
La cámara parece un clon de la XK1099+ que viene con Dumbo, pero ésta viene con carcasa. Sin embargo, la calidad de la imagen y el rango dinámico son muy parecidos, y en principio, correctos.
La emisora de vídeo VTX es completamente incomprensible. Es una UFO FPV TX35b. Lo cierto es que he sido incapaz de encontrar documentación de la misma en la web, y aunque supuestamente emite con tres potencias distintas en 48 canales, no sé decir realmente a que potencia estoy trabajando ni soy tampoco capaz de emitir en el canal que me gustaría. Con la emisora marcando D1 tengo una buena señal en el canal Raceband 4, así que esto se queda así también.
La antena que viene con el aparato es una dipolo, se puede poner una antena de polarización circular sin problema.La única gaita es que el conector es un RP-SMA, y yo suelo trabajar con SMA, pero esto tampoco es mayor problema.
CABLEADO Y SOLDADURAS
El verdadero problema viene con el cableado que traen estos componentes de vídeo, son cables plásticos, y no con funda de silicona. lo que los hace un poco demasiado rígidos para este uso. Un rápido chequeo me hace ver que carezco de los conectores necesarios para re conectar la cámara y el VTX con buenos cables, luego esto es otra cosa que voy a dejar tal cual. No es cierto. Repaso las soldaduras de estos cables en el FC y decido que es mejor rehacerlas todas. Las seis. Estos cables no van a resistir mucha manipulación, y ya se les ve sobados. Va a ser preferible dejarlo todo bien ahora a quedarme sin imagen en pleno vuelo.
Y ya que estoy con ello, repaso las soldaduras de todo el dron y descubro que por algún motivo las soldaduras de los ESCs con los tres cables de los motores se desprenden fácilmente de los PADs por lo que decido rehacer las 12, y es aquí donde corto esas fundas termorretráctiles tan chulas de los ESCs para hacer el trabajo como se debe hacer, es decir, bien hecho.
Buzzer y LEDs
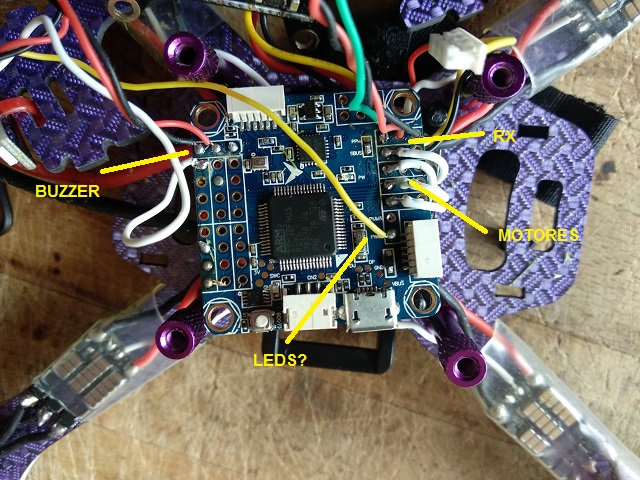
También rehago las soldaduras de los LEDs y el buzzer. No consigo hacer funcionar los LEDs. El PIN etiquetado en el FC parece que no funciona. Buscando información en la web, leo que este PIN está mal cableado en las tarjetas OMNIBUS F4 V2, y todos recomiendan poner la tira de leds en el pin PWM6. Así lo hago, seguido de un remapeado de recursos, pero aún así tampoco consigo que los LEDS funcionen. Como tampoco es la primera vez que me pasa algo parecido, estoy casi seguro que hay alguna solución al problema, pero de momento voy a dejar esto así también. Los LEDs tampoco son imprescindibles para volar
RX
Como receptor de radio RX instalo un FrSky R-XSR en la puerta serial que viene indicada en el FC. Este pin se corresponde con el UART6 a la hora de programar Betaflight.
En cuanto a la programación de Betaflight, lo primero que hago es flashear la última versión. Una vez programada y configurada la radio (com6 / Serial / SBUS) procedo a configurar los canales y las salidas del transmisor, el failsafe, los modos y los PID (me gusta la máquina «blandita» y no muy nerviosa, sobretodo para los primeros vuelos). El OSD me resulta al principio desconcertante porque todo está tapado por la barra del consumo de la batería. Una vez retirada la dichosa barra, puedo ver que es un OSD completamente normal de Betaflight.
Y con todo esto, ya estamos listos para probar. Como podéis ver en el vídeo vuela, y vuela bien, y sobretodo es una máquina bastante rápida. De acuerdo, no es mi dron preferido, y particularmente mejorable me parece el apartado de vídeo, pero tampoco diría que es un dron tan malo. Simplemente necesita un poco de amor. En cualquier caso, si has adquirido el dron y te está costando hacer que vuele, debes saber que estoy a tu disposición para echarte una mano con ello. Y si tú has conseguido hacer que esos LEDs funcionen, por favor, no dejes de decirme cómo lo has hecho!!