Objetivos
Material requerido
 |
Arduino Uno o compatible y con el firmware para S4A cargado. |
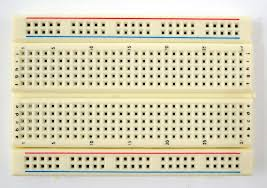  |
Una Protoboard más cables. |
 |
Tres diodo LED |
 |
|
 |
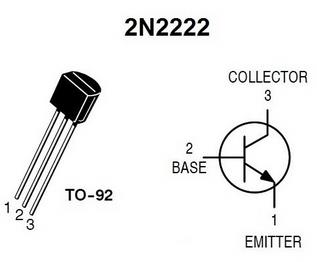
Un transistor 2N2222. Comprobad que lleva rotulada esta referencia, porque el sensor de temperatura es similar. |
 |
Un potenciómetro de 10KΩ |
LOS MOTORES DE CORRIENTE CONTINUA
Hasta ahora hemos utilizado las salidas de nuestro Arduino para influir en el mundo exterior gobernando únicamente diodos LED. Hemos podido hacerlo porque tiene capacidad suficiente (potencia) para encenderlos.
Pero existen muchos otros componentes para los que la capacidad de nuestro Arduino es insuficiente: motores de CC, accionar relés…
Para solucionar este problema tenemos los transistores.
En esta sesión vamos a utilizar nuestra placa Arduino para controlar un pequeño motor de corriente continua.
LOS TRANSISTORES
Un transistor es un dispositivo electrónico semiconductor que sirve para regular una señal de salida en función de una señal de entrada. Si volvemos a la analogía con el flujo de agua, sería algo parecido a un grifo o una llave de agua.
Los transistores trabajan básicamente de dos formas (aunque no son las únicas):
Cuando trabaja de la primera forma, decimos que trabaja en corte (cuando no pasa) o en saturación (pasa sin restricciones), pero nada de pasar a medias. O lo que es lo mismo, corte es un 0 (FALSE) y saturación un 1 (TRUE). Esto es el fundamento de toda la electrónica digital moderna: ordenadores, consolas, teléfonos…
También puede trabajar en activa, dejando pasar más o menos corriente.
Los transistores tienen tres partes: Emisor, Colector y Base (E, C y B). Siguiendo la analogía del grifo el emisor sería la salida de agua, el colector la entrada y la base el mando. Lo vamos a ver más claro en la siguiente figura.
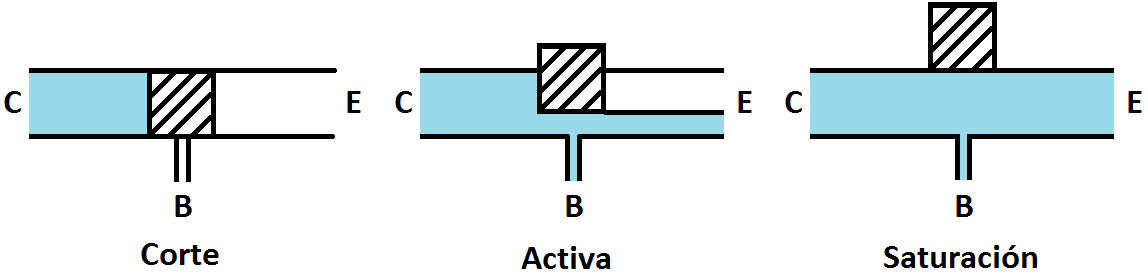
Si habéis entendido el ejemplo, sólo tenéis que cambiar corriente de agua por corriente eléctrica, y la válvula por el transistor y comprenderéis su funcionamiento.
<
CIRCUITO CON TRANSISTOR Y MOTOR CC
En este montaje usaremos el transistor de uso general P2N2222, barato y fácil de encontrar. Permite hasta 0,5 Amperios y 40V.
El esquema eléctrico sería el siguiente:
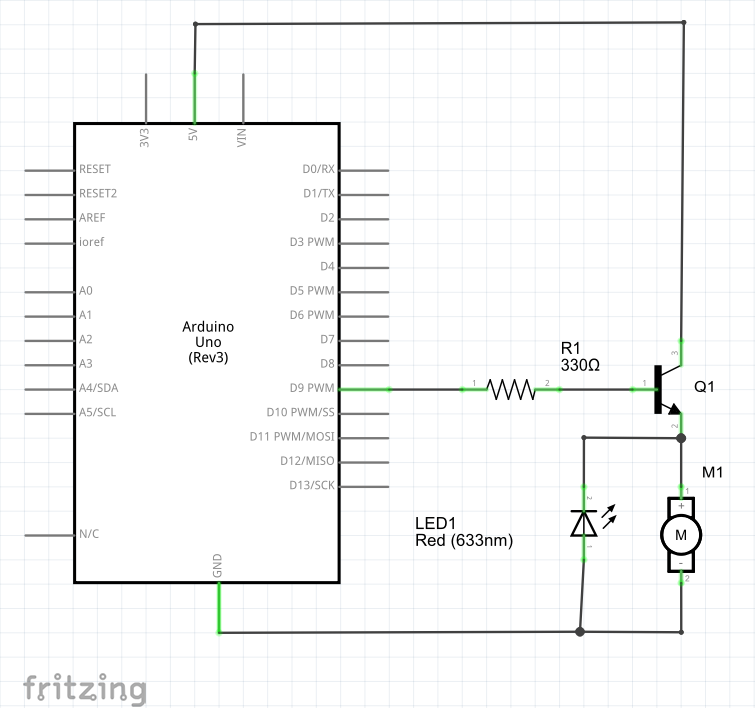
Una de las ventajas de usar un transistor es que se aísla la parte de control del circuito conectada a la base de la parte de la carga entre emisor y colector, haciendo muy difícil que quememos nuestro Arduino.
Para saber qué pin es cada pata, ponemos el transistor con la cara plana hacia nosotros (ahí está rotulado el modelo) y las patas hacia abajo. De izquierda a derecha son emisor, base y colector.
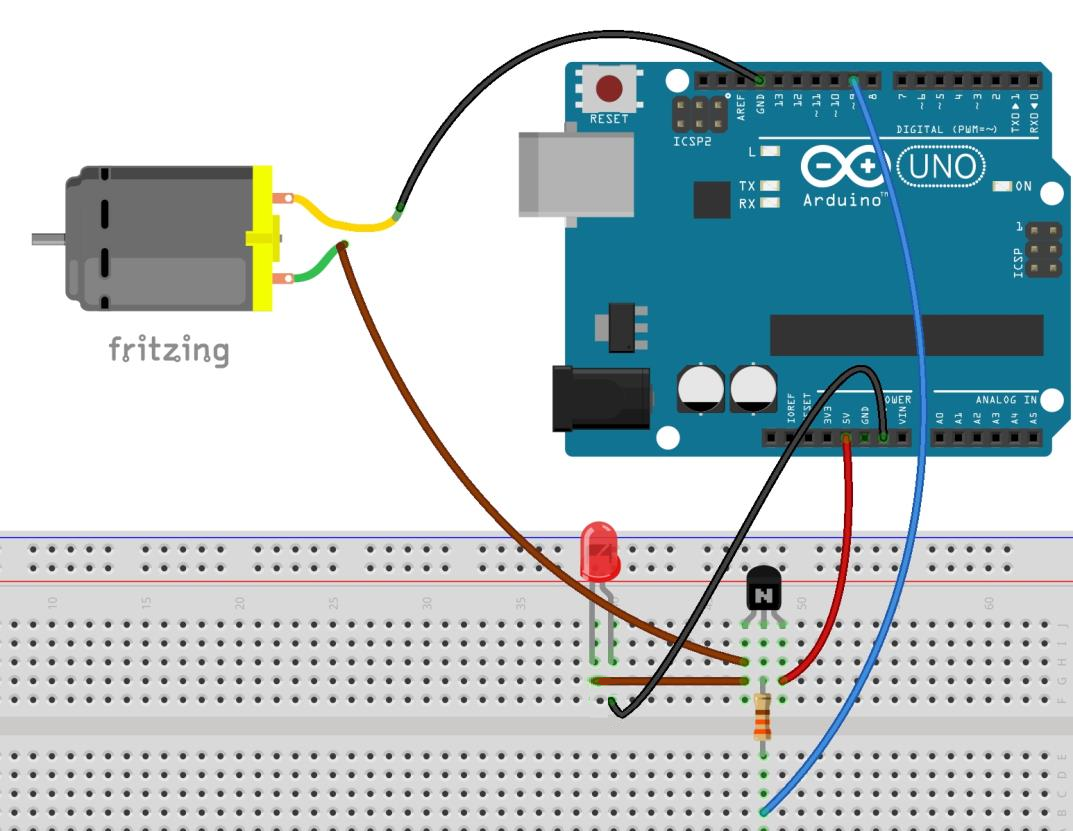
En la protoboard el circuito quedaría de la siguiente forma:
PROGRAMA DE CONTROL DEL MOTOR
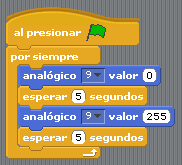
Primero haremos que trabaje en el transistor en corte y saturación, cambiando de una a otra cada 5 segundos.
Para controlar la velocidad de giro del motor mientras el transistor trabaja en la parte activa utilizaremos un programa similar al que usamos en la sesión 9 de las salidas analógicas, pero haciendo que suba y baje el valor un poco más despacio incluyendo dos bloques de “esperar 0,1 segundos”.

POTENCIÓMETRO COMO SEÑAL DE CONTROL
Os recomiendo volver a realizar esta sesión pero utilizando un potenciómetro para usar el valor de una entrada analógica para variar la velocidad del motor. El montaje sería muy sencillo combinando el de esta sesión y el de la sesión 11 de Entradas Analógicas.
El esquema electrónico es el siguiente:

No vamos a poner el esquema de montaje en la protoboard, porque ya hemos visto como conectar todos los componentes del circuito en esta sesión y en la sesión 9. Además ya va siendo hora (si es que no lo hacéis ya) de que hagáis los montajes usando el esquema electrónico, que es mucho más claro, sobre todo a medida que se van complicando los circuitos.
La programación es muy sencilla, simplemente asignamos a la salida analógica el valor de la entrada analógica a la que está conectado el potenciómetro.
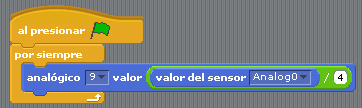
- Dividimos el valor de la entrada analógica entre 4 para adecuarla a la salida y aprovechar todo el giro del potenciómetro, de la misma manera que hacíamos en la sesión 11 con el escenario.
- Recordad que las entradas analógicas pueden tomar 1024 valores y las salidas analógicas 256.
Podéis descargar los tres programas de la sesión aquí: Transistores y Motores.
RESUMEN DE LA SESIÓN
En esta sesión hemos aprendido varias cosas importantes: